I’m now logging the PID’s in my dataflash BIN log file.
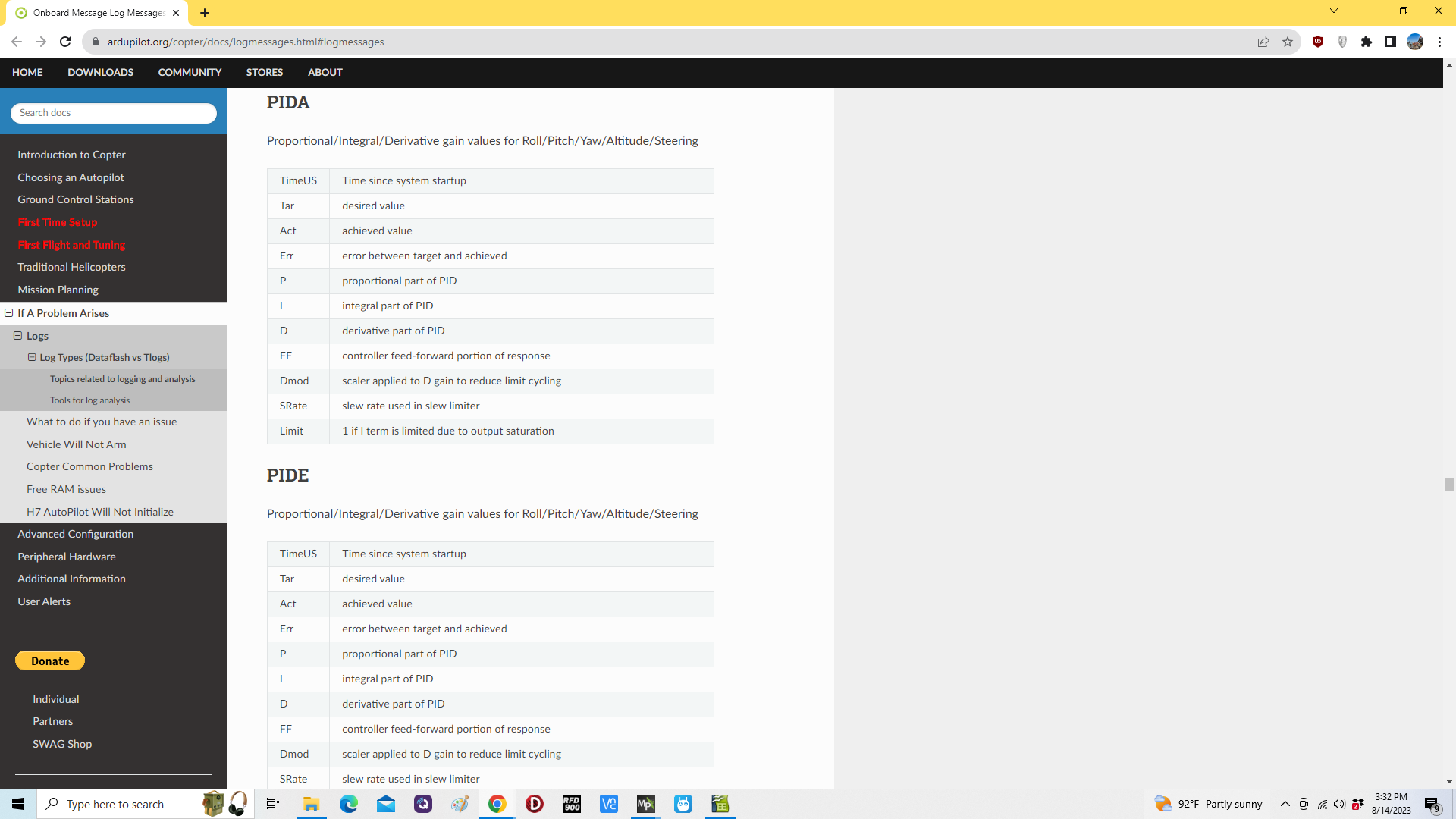
The wiki has identical information for all five of these sets of logged parameters: “Roll/Pitch/Yaw/Attitude/Steering”
Which set is which?
I’m now logging the PID’s in my dataflash BIN log file.
The wiki has identical information for all five of these sets of logged parameters: “Roll/Pitch/Yaw/Attitude/Steering”
Which set is which?
A-Altitude
E-East
N-North
P-Pitch
R-Roll
S-Steering
Y-Yaw
Excellent Dave, thank you.
Altitude, Pitch, Roll, Yaw - all seem pretty self explanatory.
But for a multi-copter, I’m not sure what East, North and Steering might be.
Can you direct me to a link where I can study up on these?
Many thanks!
Steering doesn’t apply but North(South) and East(West) does. Some of these I confirmed for myself. For example by graphing PIDE>actual vs PSCE>Velocity which I know to be an East/West metric.
You’re right about Steering - PIDS isn’t in my BIN file.
Yea, I see it in my Rover logs.
There is also Down.
So Pitch Roll Yaw and Altitude are operating in attitude control
and East North Down are operating in position control