Hello,
We are regularly flying a hexacopter with ArduCopter 4.0.7. without problems but the other day there was a strange behavior as the drone did not yaw to aim the next waypoint. I had obviously set up the parameter WP_YAW_BEHAVIOUR on 2 which means “Face next waypoint except RTL” and that is its regular way of flying.
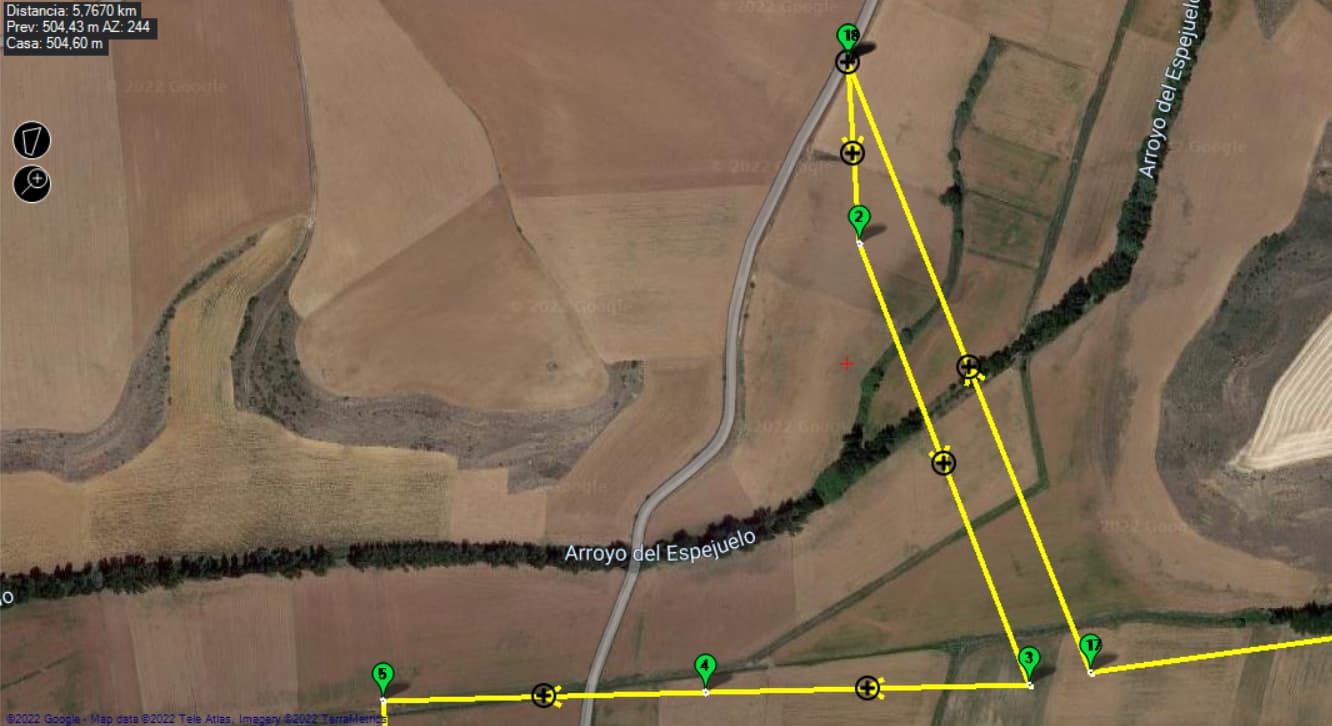
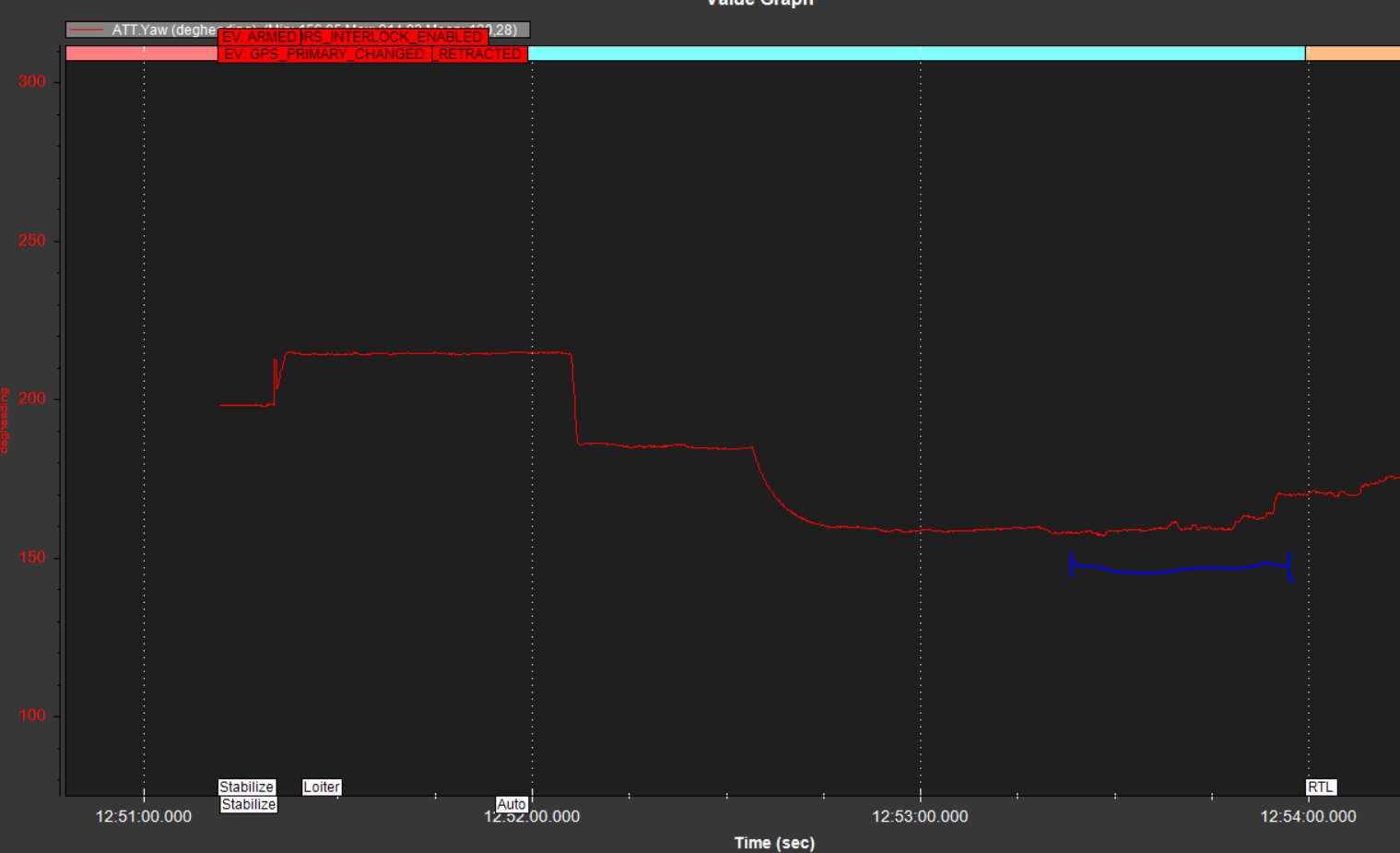
Our mission turns right in WP 3 as described in the first picture but the yaw did not change. The region where the drone should have turned is marked in blue after checking it in the UAV Log Viewer.
Is there any obvious reason why this event could have occurred? Thank you in advance.