We have a 18kg VTOL octoplane. It is our test platform - rather low T2W, Cube Black. We have crashed recently. We were trying some manoeuvres in Qstabilize. In previous flights it handled decent.
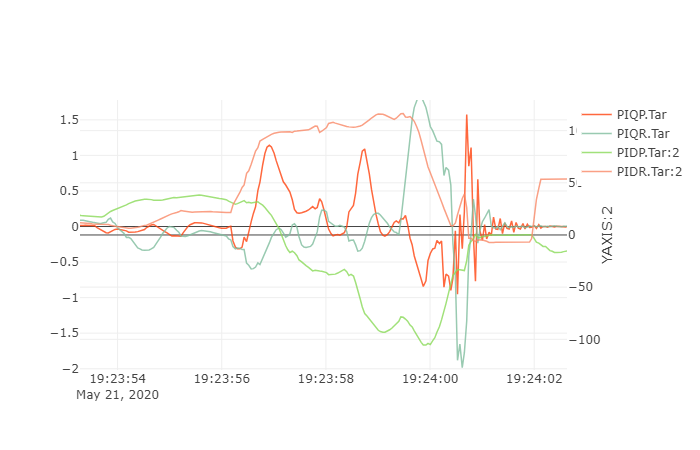
While examining logs I found something strange. Right before crash, while in unintended bank (pilot was fighting against it) target roll angular velocity for copter was almost zero (PIQR.tar; while target roll angular velocity for plane (PIDR.tar) was very high (as intended by pilot)). Why are they soooo different? If copter would steer as plane was we would probably save the plane.
I know that PIQR is in rad/s and PIDR is in deg/s it is not the case.
First ground contact is at about 19:23.59.5 log time.
video: https://youtu.be/H_0YVeqwpIw
log: https://gofile.io/d/9uxlYE
Do you have any idea why? How to fix it?