I’ve just finished setting up a 4" quad running orange cube, I followed the guide on how to tune it, everything seems perfect, flies smoothly, I like it so far but I just slapped a 4s1p li-ion battery on it to test how long it hovers for and I got a very weird behavior:
flying indoor
I take off in STABILIZE/ALTHOL, hover for a little and then put it in LOITER, it positions itself nicely and stays in place with a little drifting here and there but that’s alright
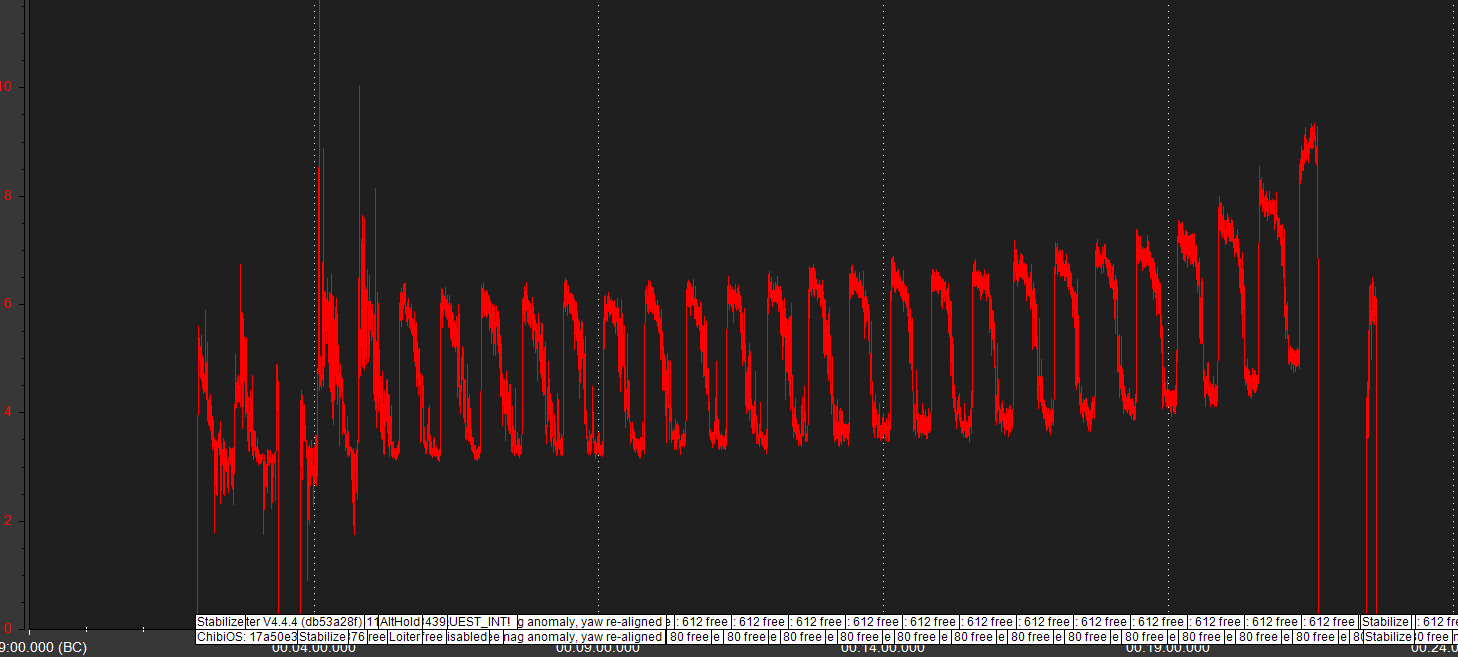
So it usually takes 3A current to get it hovering, it vibrates or oscillates (not sure what to call it) a little and starts dropping so I have to apply more throttle and it goes up to 6-7A to get it back to hovering then after a few it starts climbing so I have to lower the throttle and go back to 3A to get it to hovering level.
plotted current on log viewer (while hovering in LOITER, no user input):
Ok so I have set up the motor ranges and calibrated ESCs, didn’t seem to help.
I enabled the notch filter and it kinda solved the issue, it now flies smooth in alt hold and stabilize but when I put it in LOITER now it starts wobbling like crazy, holds it’s place but wobbles way too much.
EDIT:
After adjusting the D terms as @dkemxr suggested, it seems to hover almost perfect now with the notch filter enabled aswell, slight wobbling here and there but nothing serious
dropped ROLL D RATE from 0.002 to 0.001
dropped PITCH D RATE frrom 0.002 to 0.001
Although it flies nicely, it seems to draw more amps now (4-6A while hovering, it used to take 3-3.5A) I’m not sure if my power brick is giving false reading or what
Another unrelated question:
I’m running a 4s1p li-ion battery, I read that the lowest safe voltage is 2.5v per cell, does this mean when the reading I’m getting reaches 2.5v * 4 cells (after voltage sag) that I must land? It usually goes up to ~11v after I land which means it still has more juice
I will try to run an autotune now (first time) to see how it goes.
Since this is gonna be an indoor quad, do I need to run the autotune indoor or it doesn’t matter?
If any cell voltage drops below 2.5V you risk permanent damage of your cells, so yes, you have to land immediatly if your voltage goes below 4*2.5V = 10 V. Better land little earlier becouse your cells might be not 100% identical even if they are balanced before start.
That the voltage rise again after you stopped using higher current is normal. But notice the unencumbered voltage alone is not the best state of charge indicator
That’s illusory because it’s not configured properly and it’s doing nothing.
Disable FFT. FFT_ENABLE,0
And set these:
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
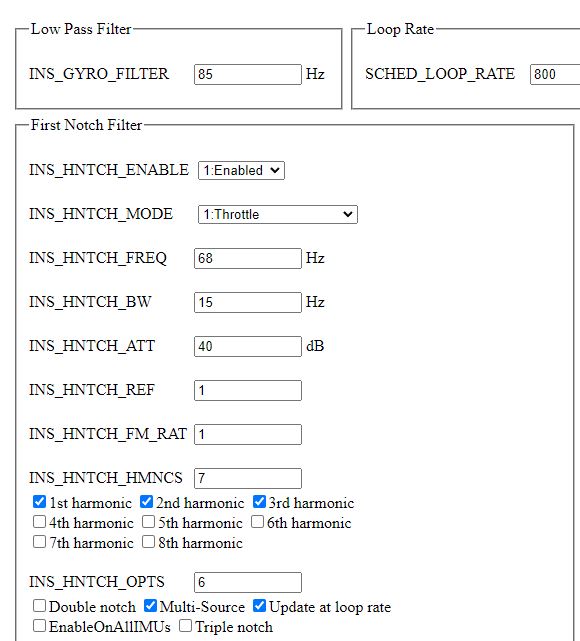
Then make another hover flight in AltHold and use Webtools to configure the notch filter with throttle reference. Webtools
Or post a link to the log for help.
And don’t bother with Auto Tune until the output oscillation is dealt with. We will see that in the Notch filter config flight.
I’ve updated the params and went for a test flight of about 30 seconds in ALT HOLD (I had to apply user input to keep it in it’s place, hope that doesn’t ruin the test)
I took the log file and put it into that web tool but I had no idea what I was looking at
Any help understanding what I’m supposed to do with those values?
Normally you would then do another hover flight to see how it’s working as the settings chosen were based on “estimated post filter” results.
Before doing an Auto Tune you may as well increase these as they are too low for a 4". Auto Tune will likely increase them, perhaps much higher.
ATC_ANG_PIT_P,9.0
ATC_ANG_RLL_P,9.0
Absolutely you should switch to Dshot and do it now before you go any further with configuration and tuning. Steps to follow:
Flash the BDshot version of firmware for Cube Orange by going here CubeOrange BDshot and downloading the .apj file. Then use Mission Planners “load custom firmware” option to flash it.
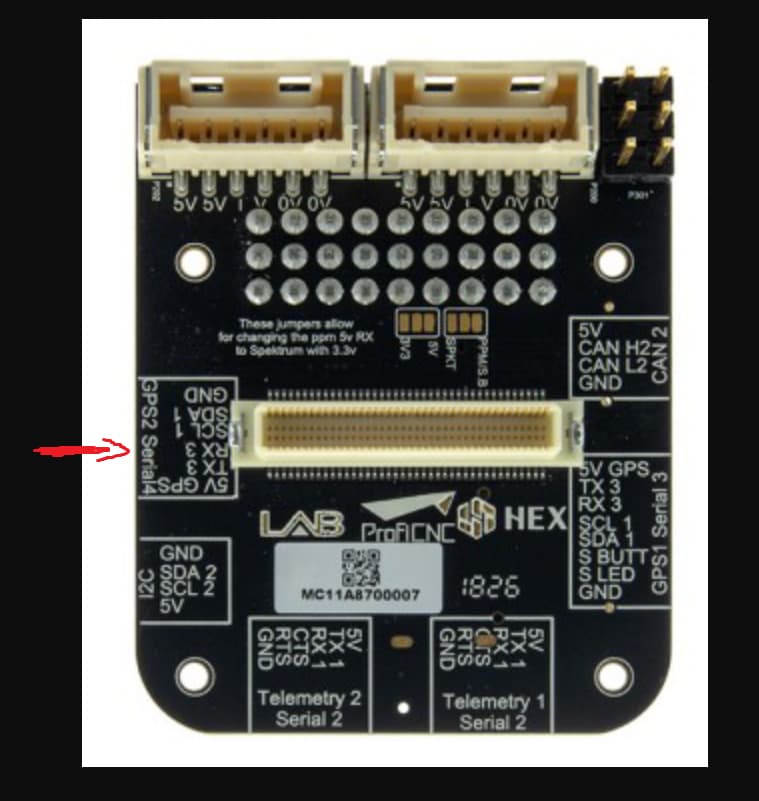
Move the Outputs to the AUX channels on the cube and re-assign the motors to those chanells. Info here Dshot Use Dshot600.
Then configure for Bdshot. Info here Bdshot
Make a flight and see if you have ESC RPM in the log.
After doing this the notch filter configuration will change for the better.
Take a look at my blog post on this forum. I explain how to configure bdshot600, esc telemetry, notch and so on. All step by step without skipping any details
You don’t need ESC telemetry at this point. The goal is to get Bdshot working which will supply ESC RPM. But set the Protocol to 16 in any case. You also don’t need to configure any settings in BLHeliSuit at this stage either but have you set these parameters?
MOT_PWM_TYPE,6
SERVO_BLH_AUTO,1
SERVO_BLH_BDMASK, (to the outputs you have connected the motors to).
SERVO_DSHOT_ESC,1