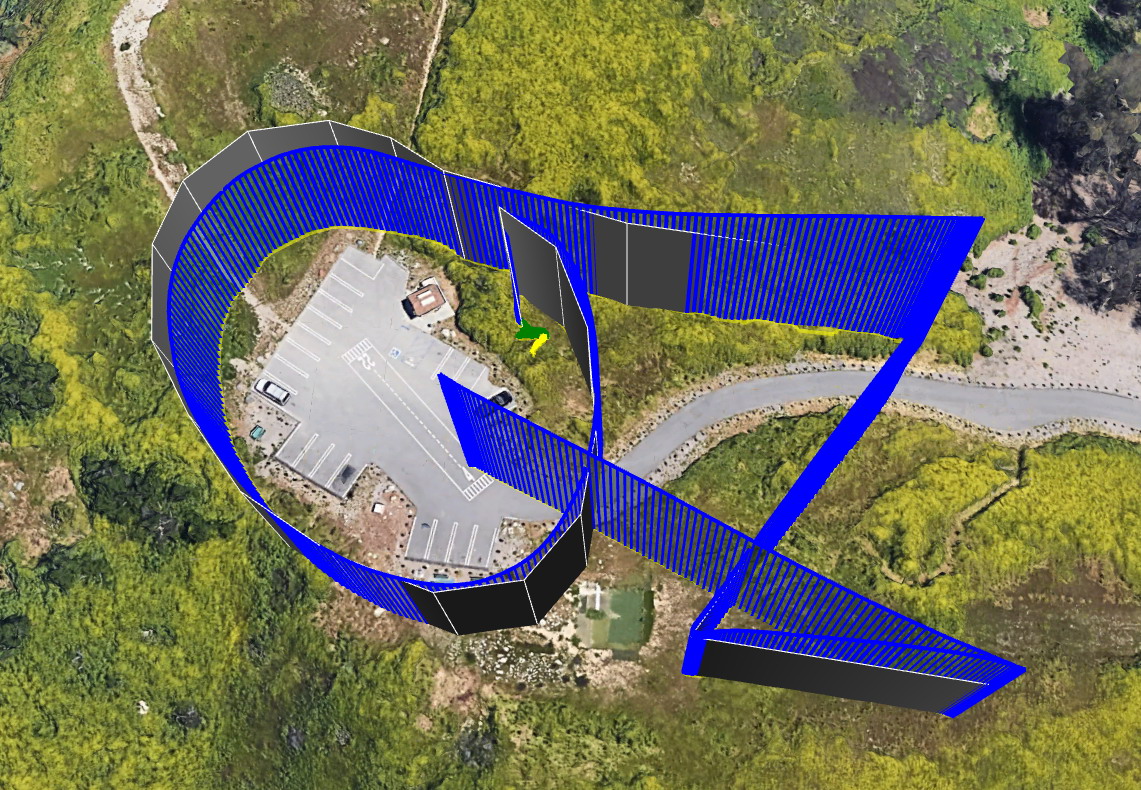
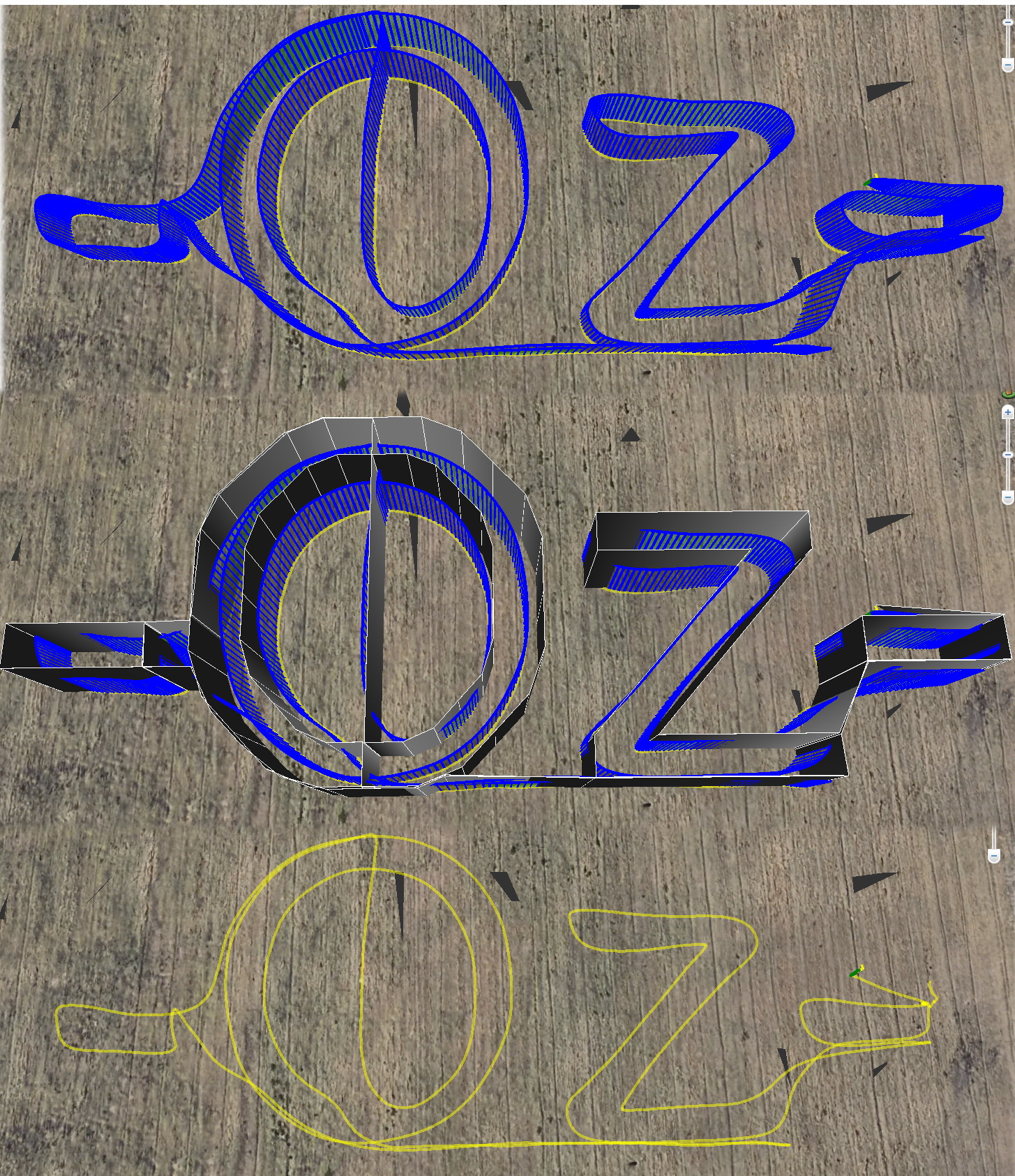
I want to have a mission fly like its writing a word, and if possible in cursive. I have done simple letters before (like picture below), but I would like to step it up a notch and have more waypoints and done cleaner. The problem is the freehand nature of adding waypoints (specially with text that can be any orientation on the screen)
One idea, if I could use notepad and write what I wanted, then overlay it on MP, I could easily add the waypoints by tracing the overlay (adding way points along the text), is one idea.
I would think someone has done this before, I did it ~7 years ago with APM FC, but it was crude and the AC code back then was not as good…
Think in spherical coordinates: given a center (latitude, longitude) and given a point, calculate the GPS coordinates of that point rotated R degrees around the center, generating the formulas for this operation.
Extract the GPS coordinates from the mission file generated with MP and copy them in a spreadsheet. Insert the formulas and you get the coordinates instantly. Paste them in the mission file.
This is very similar to an application I’m considering. I’m involved with the development of an AHRS to help a bobsled coach evaluate the performance of the athletes/drivers. I think that a model aircraft could be a good test bed for the AHRS if it could be programmed to fly a highly dynamic course similar to the path of a bobsled track. A bobsled track takes about a minute to complete with 15 to 20 turns. The bobsled reaches speeds of about 80 mph with g-loads up to 5 gs in the final turns. Any thoughts will be greatly appreciated.
My flying background is only LOS (very little fpv). My 3+ year old LOS quad accelerates at 9G’s and corners at 15G’s, does 84mph on 4s and 105mph on 5s. The new lightweight quads are doing 15G’s acceleration, (cornering is past the limit of the 16G ACC) . I think they would be capable of taking on that challenge. One problem I see is AC is quite a bit behind the 5" prop preformance quads (compared to betaflight acro mode control and stability). Although, a bobsled run is not a very tight track relative to what a preformance quad can do, so it might be just fine on AC.
FYI, there has been some autonomous drone racing challenges, I think this maybe different than what your thinking/planning (because they use cameras for correction instead of just a waypoint mission), more info here.
Thanks for the information. My background is in fixed wing RC so I’m leaning in that direction. I know quads are much more maneuverable although I wasn’t aware that they could execute such high-g turns.
My biggest concern though is if the quick succession of so many turns is within the capability of the control system. I’ve seen videos of autonomous missions and it seems like they have a lot of short term corrections.
Mostly it’s that I haven’t found anyone doing anything close to this so I’m wondering what the scope is of the new ground that I’ll need to plow. Thanks
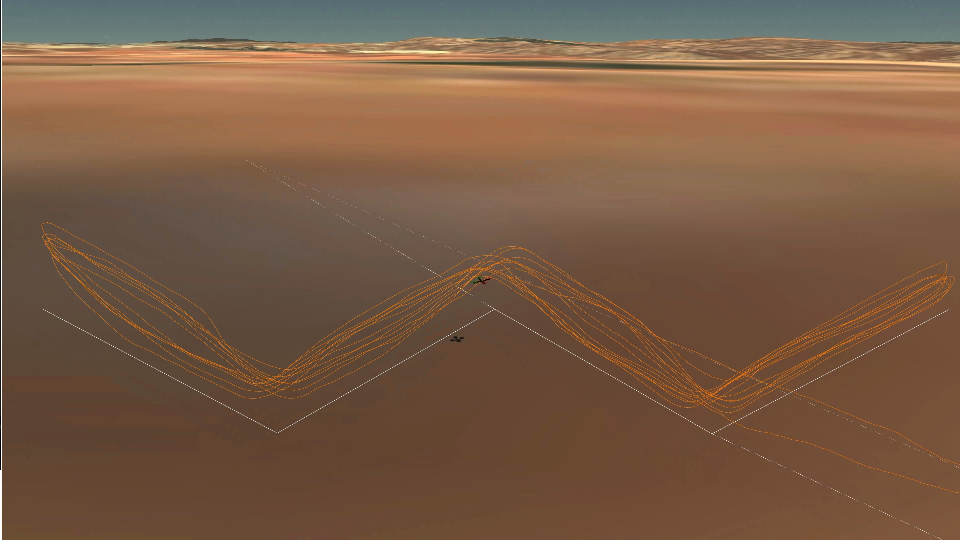
A variation of this could be placing the text waypoints on a vertical plane, which can be done simply as follows:
Start with a simple text such as “abc” oriented east-west (no rotation), with constant altitude (better for rangefinder, such as 1 to 4m).
Place waypoints (type 16) latitude and longitude on a spreadsheet.
For each waypoint a new one will be generated with constant latitude (that of the vertical plane east-west), same longitude, and altitude proportional to latitudes difference between that of the original point and that of the vertical plane.
Paste the new waypoints (constant latitude, same longitude and calculated height) on the mission file, and start testing with a low speed, such as 1m/s.