Hi,
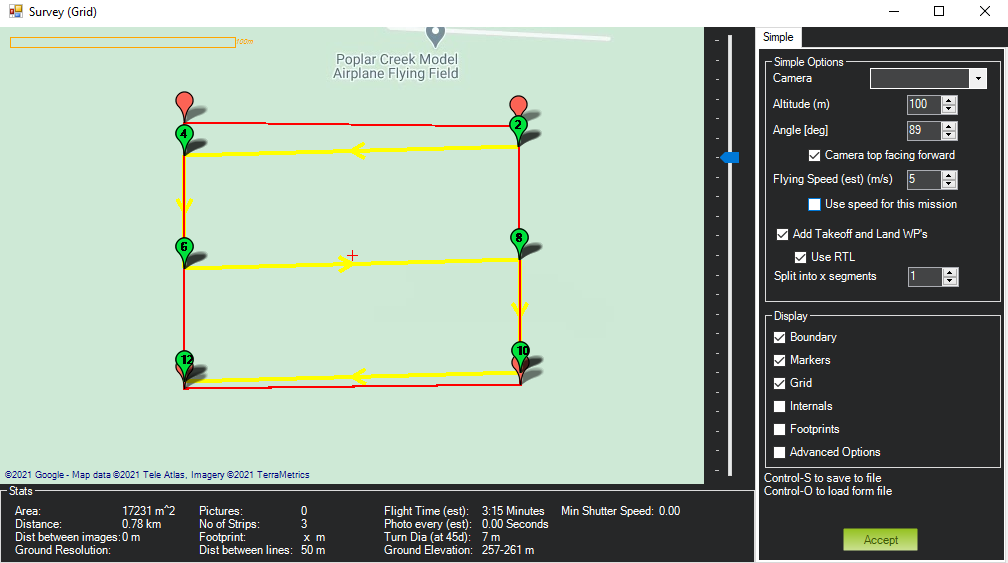
Does anyone know how to reduce or completely disappear these white and red circles when plotting way points?
Thanks
Hi,
Does anyone know how to reduce or completely disappear these white and red circles when plotting way points?
Thanks
You have to change the WP Radius on the Flight Data window or in your parameters (WP_RADIUS).
Thanks. I assume for the final flight plan, the radius should be sufficient for a plane to turn properly? so changed it to like 10 which is 10 meters…
Yes, but if you read the parameter’s description, you can see it has a workaround in case it can’t turn properly.
Defines the maximum distance from a waypoint that when crossed indicates the waypoint may be complete. To avoid the aircraft looping around the waypoint in case it misses by more than the WP_RADIUS an additional check is made to see if the aircraft has crossed a “finish line” passing through the waypoint and perpendicular to the flight path from the previous waypoint. If that finish line is crossed then the waypoint is considered complete. Note that the navigation controller may decide to turn later than WP_RADIUS before a waypoint, based on how sharp the turn is and the speed of the aircraft. It is safe to set WP_RADIUS much larger than the usual turn radius of your aircraft and the navigation controller will work out when to turn. If you set WP_RADIUS too small then you will tend to overshoot the turns.
Hmm , i guess you are noob or you need quick and easy so try to QGC it’s really easy to use when I was new then only 10 to 15 min to understand what’s going on here and what’s happening.
10m would be pretty tight for a plane, unless it’s a really slow plane or it can turn like it’s on rails.
A rule of thumb if you aren’t sure would be to take your cruise speed and multiply by 3. So if you’re flying 12 m/s then try 36m radius. Then see how the plane is doing. You can always raise or lower the WP radius as you need.
@ Allister Thanks for your reply. I will be testing a new Delta wing (Grim Reaper) so it can do tight turns, but I will adjust the radius accordingly once I am done doing test flights prior to using waypoints.
I like your suggestion about cruise speed multiplier. i will take that into consideration.
One more question for you.
Will the plane go out of the polygon way points on its own, make a turn and then resume waypoints as they are plotted inside the polygon?
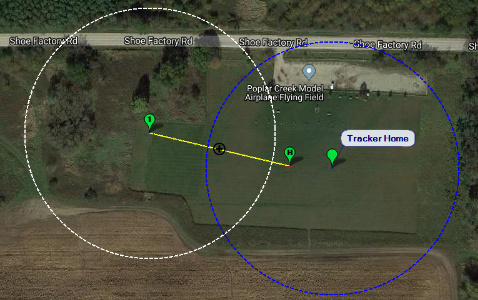
Also, what si the difference between “Home” and “Tracker Home”?
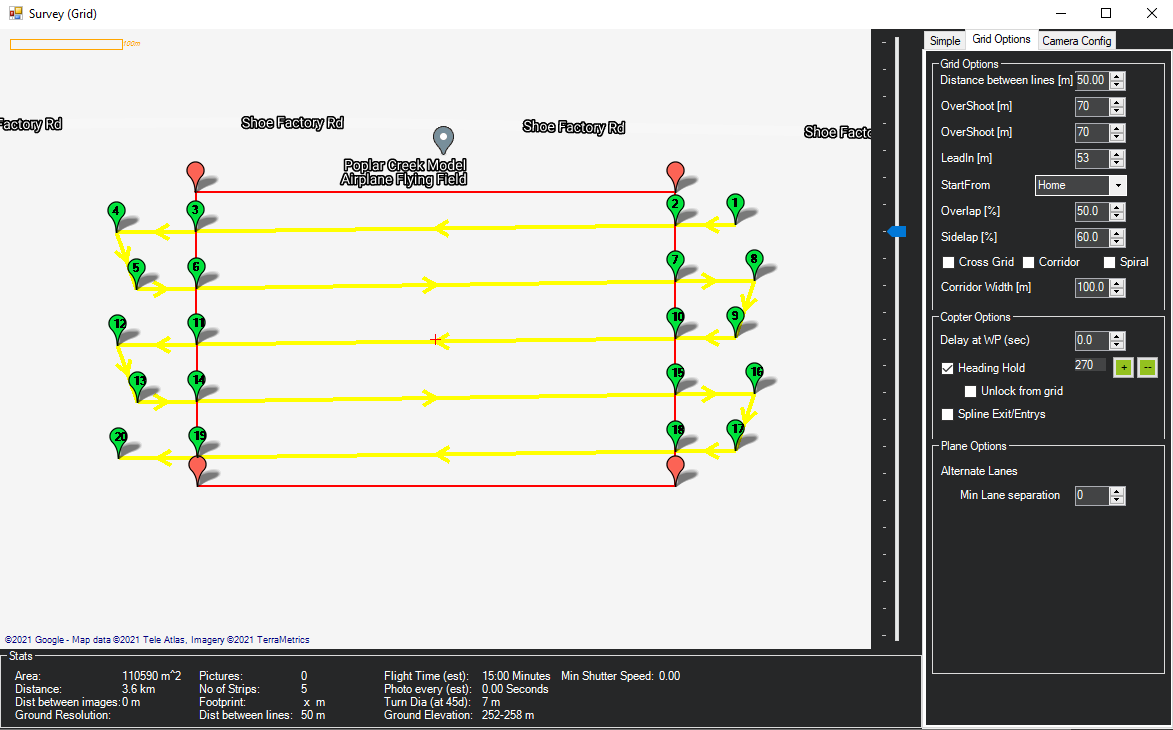
I see your spacing is 50m between lines so odds are it would get to WP 4, crank over to make the turn to meet WP6 and probably miss it. The plane will leave WP4 and go south to WP6, it’s not looking towards the next WP so it will get to WP6 on a southward track then turn towards WP8. By the time it’s on the line to WP8 it would be half way there before it was centred. Planes don’t fly small grids as nice and neat as multi rotors do.
In that menu on the right side of your screen shot there is a check box for “Advanced Options”. Check that box and another tab for “Grid Options” will appear. You will have the options to set Lead in, Over Shoot, and Alternating rows.
How far to set these lead ins and overshoots is up to you and your plane. Again, try 3 or 4 times your flight speed and then dial it in.
Of course if you’re just planning a route like this zoom around and have fun, and that accuracy on the lines isn’t critical then don’t worry. (Don’t take that the wrong way, I’ve been known to do that just to “test” a plane  )The plane will still fly the route but it won’t be spot on. However if you’re using the plane for mapping or spraying then that accuracy becomes very important.
)The plane will still fly the route but it won’t be spot on. However if you’re using the plane for mapping or spraying then that accuracy becomes very important.
A tight grid like the one you have here will also highlight any problems in your tuning if it’s not dialled in. Depending on your plane it could be a really good test.
I’m not sure about tracker home. I think that’s used if you’re using a GPS module with the computer that’s running mission planner. But that’s a guess so don’t hold me to it.
Home is your starting point for setting up the mission. This will be replaced with the home location of the plane when it’s connected.
Allister you are Awesome! Must be an engineer, very detailed oriented like I am
Your above tips pretty much answered all my questions. Below are modified results. I am just monkeying around with way points (never used them with a fixed wing plane). This test is for a fairly large VTOL plane we have designed (11’ 3" wing span) in the future for surveying, mapping, forest fire monitoring etc.
What does “heading Hold” and “Spline Exit/Entrys” features do? I know they are only applicable to copters. Just curious…
p.s. By the way, have you ever played with FrySky Lipo Battery sensors? I bought 10 of them and none are working…lol
Looks like a great machine! That’s going to take some space to turn. Thanks for sharing the picture.
I’ve never used heading hold and Spline entry/exit with mission planner. If I had to guess (and I’m thinking it’s similar to other “name-brand” drones out there that’ve used a ton of for mapping) heading hold will keep the copter facing in one specific direction for the mission. The GIS/mapping folks I work with sometimes request this so each line of the survey has the same camera perspective, regardless of the flight path.
I’m less sure about spline entry and exit.
Sorry, can’t help with the LiPo sensors.
It would be interesting to see how a VTOL handles waypoints! I have never tried that before.
First we are going to test it on a smaller size VTOL (We have 3 different sizes).
Looks like you have good amount of surveying experience. Would it be alright if I ping you via email in the future? I will be willing to compensate you for your time for commercial discussions.
Thanks for all your help. You saved me a ton of time. Time to do a test flight once the freaking snow melts in IL
Go ahead and ask the questions. I’m not afraid to say I don’t know.
sent you an email. Please check!
@Allister figured out what Tracker home means. Tracker home is the marker you put on the map for antenna tracker location if you are using one.
Tracker stand location and then we have a plane home location. I think this is a cool addition.