For a Waypoint Mission is it possible to slow the speed to yaw rotation at each waypoint. At the moment when the copter reaches the waypoint the yaw to face the next waypoint is very sharp
David Ardis
For a Waypoint Mission is it possible to slow the speed to yaw rotation at each waypoint. At the moment when the copter reaches the waypoint the yaw to face the next waypoint is very sharp
David Ardis
Decrease ATC_SLEW_YAW
Thanks that has improved the yaw a lot. Is there a way to prevent the copter from moving to the next waypoint before the yaw is complete without a delay?
I don’t think so. The delay command may not do what you want either. It will reach the waypoint and remain at the heading it was on for the delay period, then yaw and move to the next waypoint simultaneously. These kinds of things are easy to test in the Simulator.
Stupid idea, but how about when plotting waypoints, on purpose make them longer to allow the turns to happen properly? 
Make what longer Asim?
The turns…
Sorry, not following. Do you mean a larger WP radius?
yes…I know a silly solution…but may work…giving quad/Plane extra time while turning. so simply adding extra way points… not part of the mission.
I went back and looked at the problem again. After an Autotune ATC_ACCEL_Y got reset to 23000 and I usually had it at 14000. Reset the ATC_SLEW_YAW back to 6000 and the turns auto turns are much better
David Ardis
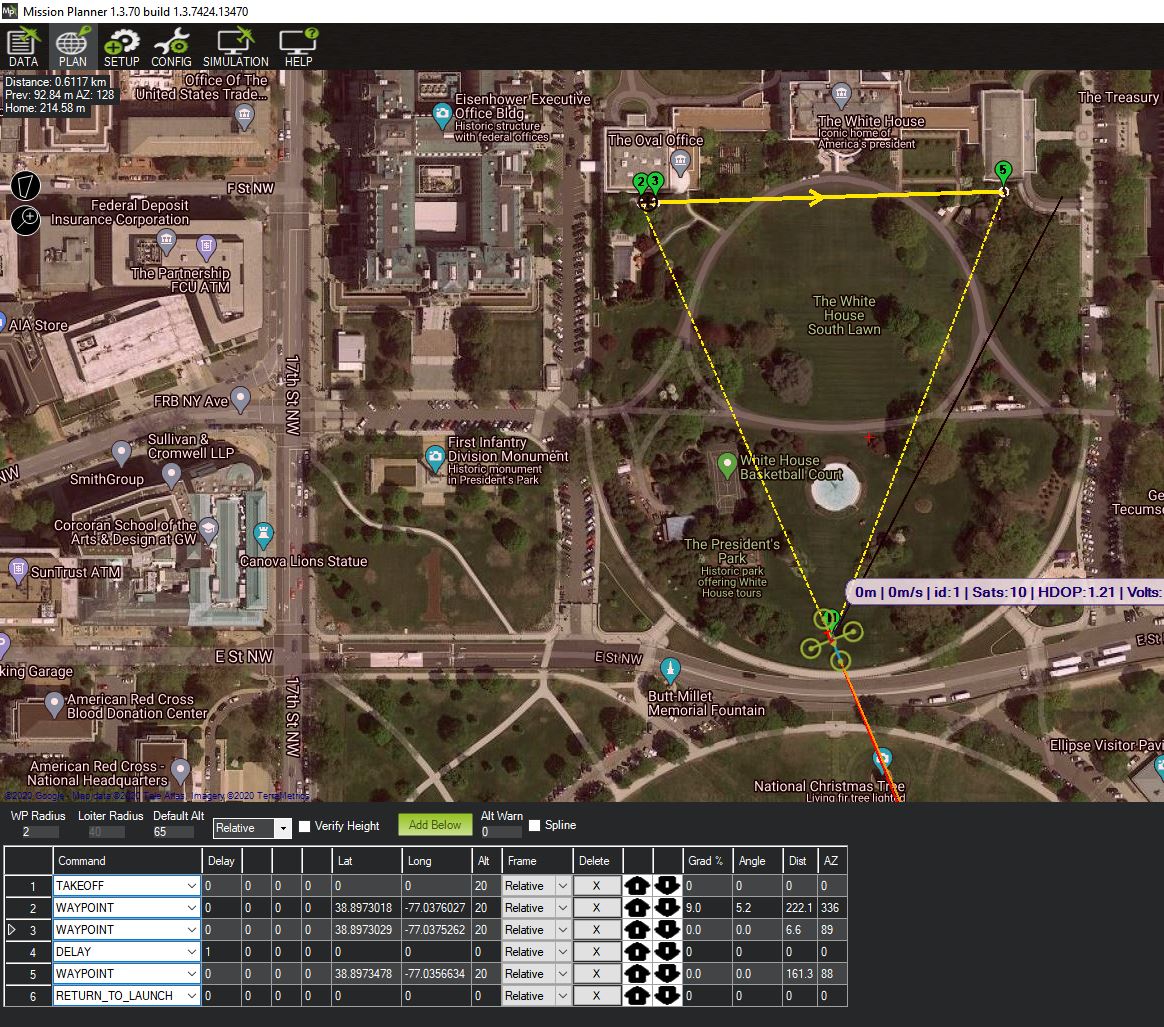
OK, great. But the premise of your question is still valid. If I understand Asim’s point you could place a WP directly after a preveous one and on the mission path to the next and put a short delay at the extra WP. I realize this doesn’t meet your criteria of no delay but a workaround anyway. Take for example this Mission around the White House lawn. If you run it in the Simulator you will see it work 
Lol @whitehouse lawn…Dave you will be arrested shortly… FBI is on its way 
I have flown virtual mission at Red Square and central Pyongyang depending on who is asking the question!
Does Waypoint radius solve his problem? default is 30
I have never used SITL, first time trying it.
I am getting error after;
./waf configure --board CubeBlack
./waf copter
Could not find the program [‘arm-none-eabi-ar’]
ALSO;
Asim T580@Asim-Laptop-Main ~/ardupilot
$ sim_vehicle.py --help
-bash: sim_vehicle.py: command not found
Not really. It will start to yaw earlier so the result might be what you want.
I just use the Simulator in Mission Planner.
I am trying to learn how MAXProXY and MAVLINK works…
Its giving me error message im MP, SITL Images can’t be downloaded. do you have to FC connected in MP? I guess…else how MP would know where I am…dah… am I right?
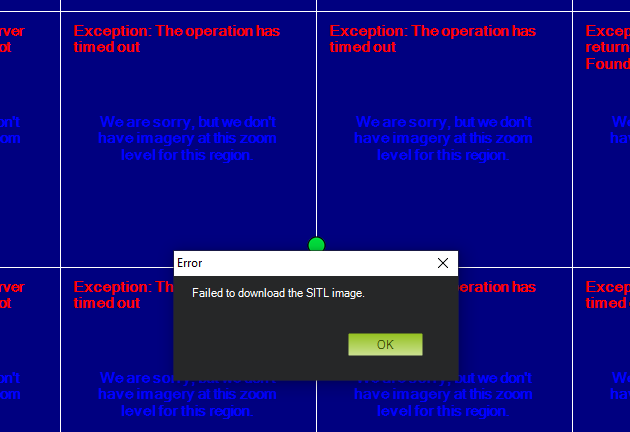
No flight controller required from Mission Planner. Just load an example vehicle. Obviously I’m not sitting on the White House lawn Set home wherever you want.
Why is not loading images then?