I don’t know the answer to your question about minimum speed but I use a zero-turn mower with skid steer steering in Ardurover. Pivot turns for skid steer steering makes a sharp turn. What type Rover do you have?
Hi
I’m using a crawler. The idea was to slow down when arrives to a way point and turn more agressive, not doing a looong arch. The idea is the rover goes through lines of trees anf if it does this archs maybe did not reach the second line correctly
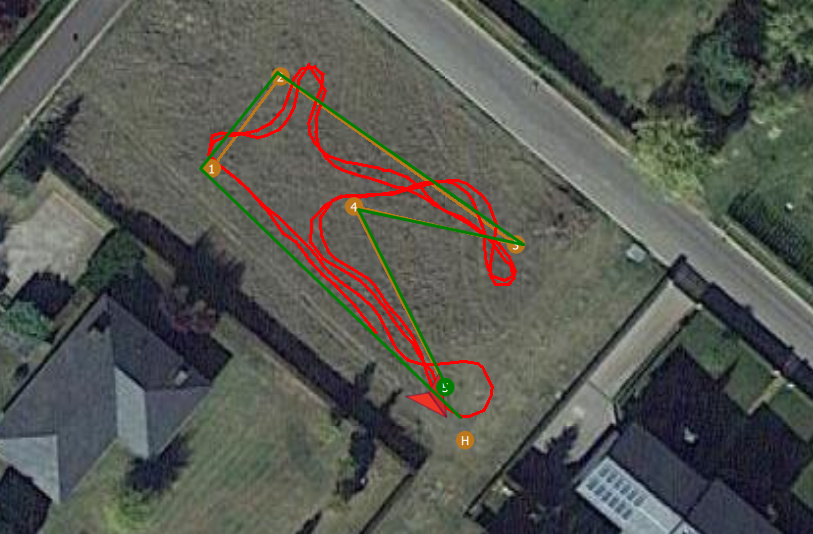
Now is doing this, red lines are the path followed by the rover and green the desired
I am not sure I can help much, but I will point out a few important things that come to mind.
I assume you are using skid steering (SERVO1_FUNCTION=73, SERVO3_FUNCTION=74) as described here http://ardupilot.org/rover/docs/rover-motor-and-servo-configuration.html. If you are using skid steering, then you can enable pivot turns as given here: http://ardupilot.org/rover/docs/rover-tuning-pivot-turns.html. That will give your rover the ability to turn on a dime at the corners. Of course, there is a lot of tuning required to make things work well. Which brings me to what I feel may be your main problem and that is just your speed and tuning needs serious tuning work. This can be very frustrating but is the most important thing to having good control.
Also, the Navigation loop should be tuned once steering and throttle are tuned. It can be tricky in my experience.
Also, having a working and calibrated compass is important.
If you upload your flash logs from your SD card, someone here may be able to help you more. I will take a look but am not as versed in how interpreting logs as others.
Hi
Thanks for your help, now the rover is doing the path better, but with some waves. I’m going to calibrate and trying to fine tuning…but I think that the better way to do an angle waypoints turns has to have a skid steering, no?