I met some problems about tracking error during way point flight in auto mode.
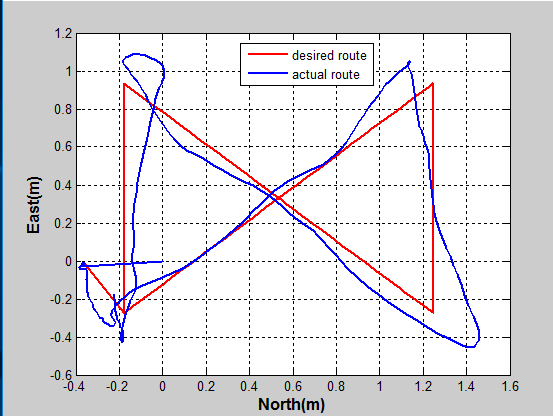
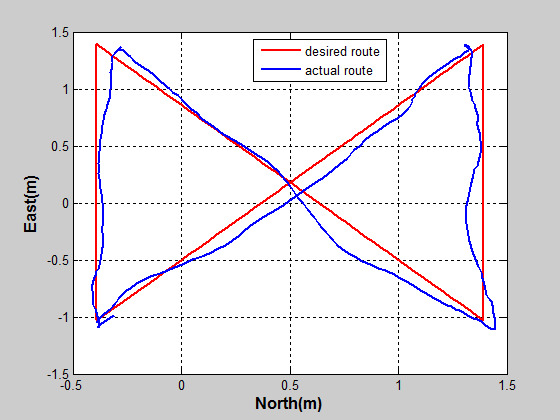
I’m using a qudurotor to do a task about WPnav flight indoor recently. The its actual flying route is bad. Compared with the desired route,the tracking error is a little large. the drone flied along a curve obviously,but not a line.the curvature is a little large caused by the tracking error.
The picture below shows the detail about actual flight test.
I want to reduce the tracking error, what can I do? do something about PID parameters? or ?
Thanks for your help!
I did fly indoors. The vehicle‘s position information is got from the indoor Motion Capture System, where the estimation error is centimeter level even better.
I have run the same test outdoors with the good GPS, the error is worse.
therefor, I guess something about improving its tracking approach or PID parameters may reduce the tracking error.