How can these warnings be resolved? What caused the warning?


Yaw alignment isn’t an issue. That’s a good thing. It will come up on every flight.
Terrain clamping … I"m not sure.
GPS, see my other post. (don’t double post problems, that just confuses the issue)
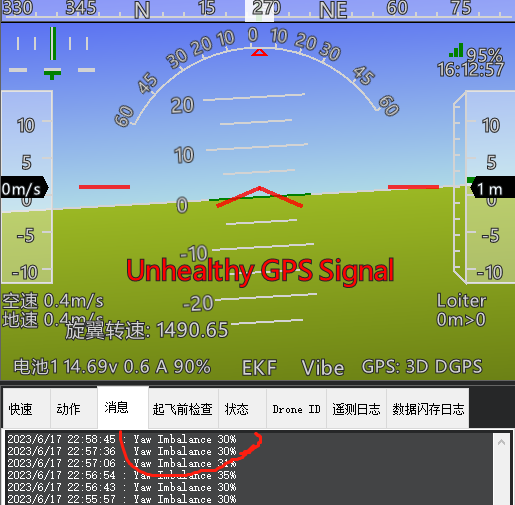
Thank you very much for your answer. The third question I would like to ask is Yaw Imbslance in the message bar below
I’m not sure about the Yaw imbalance. I believe that is a helicopter specific issue so I’ll have to let one of the heli folks address that.
good Thank you very much for your reply
@wangjiayun
“Yaw imbalance”
i have the same problem with one of my helicopters. In an older post I think I read that the toe-in of the tail rotor blades are not preset accurately enough. Therefore, the back torque of the tail rotor is still not correct at the moment the helicopter takes off.
If I remember correctly, this can be seen by the fact that the PIDY-I value is too high. I’m sure Chris @ChrisOlson or Bill @bnsgeyer can tell you something about this.
With my helicopter I recognize that it turns the nose away briefly at the moment of takeoff, until the FC has caught it again. I therefore adjust the angle of attack of the tail rotor blades from flight to flight until I see an improvement.
BR
Heri
Hi @wangjiayun
@heri is correct. That is what this warning refers to. Typically I set my tail rotor pitch so that the SERVO4_TRIM corresponds to the tail rotor pitch required for hover. By the way, There is a new feature in 4.4 that replaces the existing collective to yaw with one that better predicts the required tail rotor pitch for collective position.
1 Like
Good news. Will make fine tuning easier.
@heri it talks about this in this new wiki page on tail rotor setup. The bottom of the page describes the collective to tail rotor compensation.
https://ardupilot.org/copter/docs/traditional-helicopter-tailrotor-setup.html