My hexacopter flies really well and it’s been tuned several times. Just as curiosity and trying to prevent some future errors, I have noticed that my CW motors are spinning faster than all my CCW motors. Is there a reason for this behavior? It doesn’t seem as a motor imbalance, since I have checked with a bubble level a lot of times. My motors M1, M3 and M6 are always higher than M2, M4 and M5.
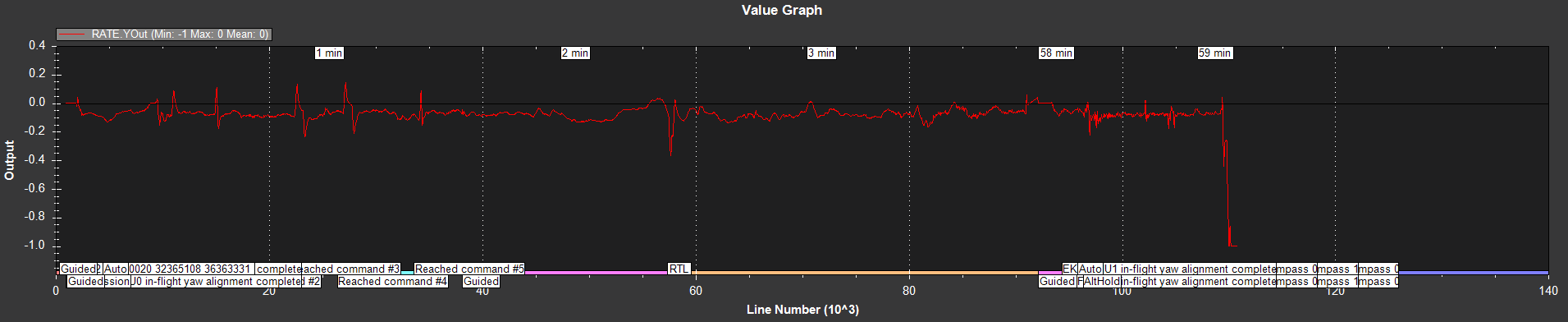
This graph is the rate controller’s yaw output on 8.BIN. As you can see, it sticks around -.08, which is a slow but significant left yaw - this explains the PWM mismatch. The flight controller is therefore fighting a natural right yaw tendency in order to maintain a steady heading.
This is almost always caused by a misalignment in the motors. You say you checked the alignment already, although maybe the misalignment is smaller than a bubble level can detect. On some frames, you can use a straightedge to check alignment by laying it across the top of two motors and measuring the distance between the straightedge and tip of the propeller. The easiest way I know of is just laying the drone on its back and measuring the distance between prop tip and the floor, if your frame allows the drone to rest on its motors.