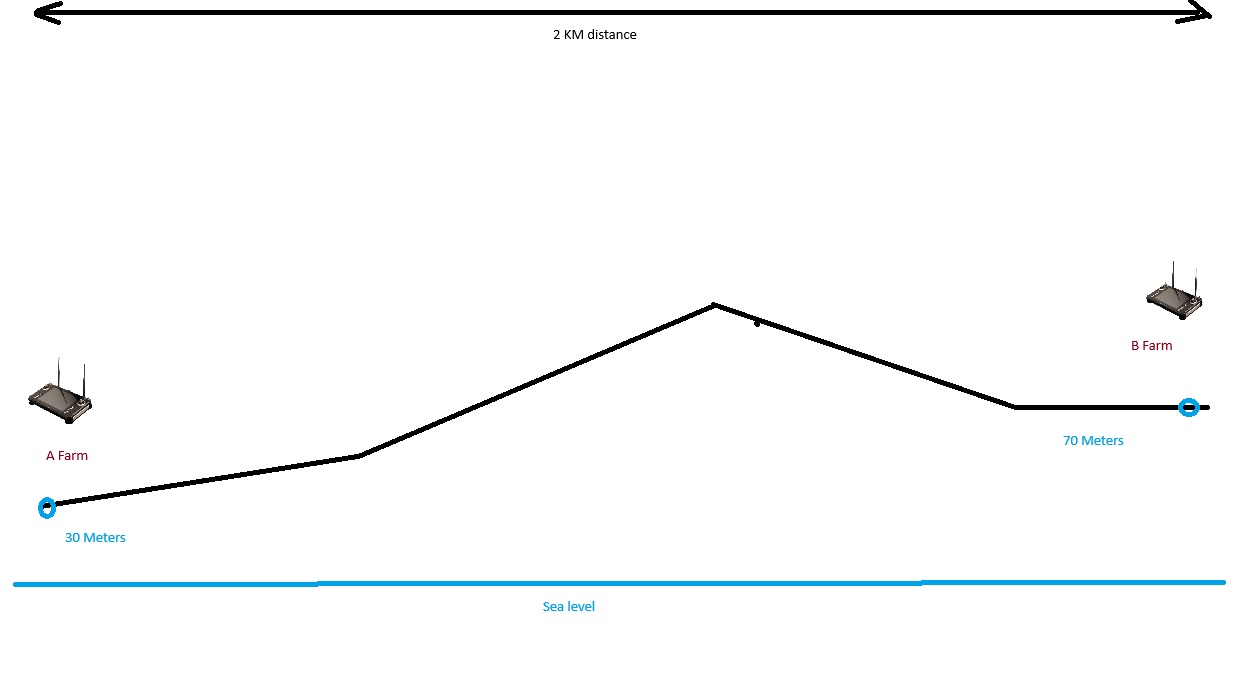
Hello, I would like to ask and find out the opinion of professionals on how to properly set up a flight mission in a similar situation. There are 2 farms A and B. Both of them have a pilot with a ground station that is connected to the copter. The idea is that the copter should fly from farm A to farm B and back. But they are at different levels relative to sea level. How to correctly explain to a copter how to land when its 0m does not correspond to reality? Thank you very much for answer
I am by no means a professional, but my first thought would be to get a downward facing rangefinder.
That way, you don’t have to rely on baro alone to get 0m correct.
2 Likes
But is there a way to indicate and explain to the drone exactly what altitude it is at when planning a mission in Mission Planer?
Don’t know why I didn’t think of this earlier, you can also set mission altitude relative to terrain in Mission Planner.
You can read about his here: Terrain Following (in Auto, Guided, etc)
Landing specific here: Using Terrain Altitude during RTL and Land
2 Likes
Just read that. Just more imortant thing, maybe already tested it. What if i will fly according “Relative” and only “Land” point will choose according to “Terrain”?
Should probably work, however I am not sure if “relative” is relative to home or relative to start.
If you want the drone to fly the exact same path on both legs a combination of “absolute” and “terrain” is maybe safer.
Relative is based on the home point.
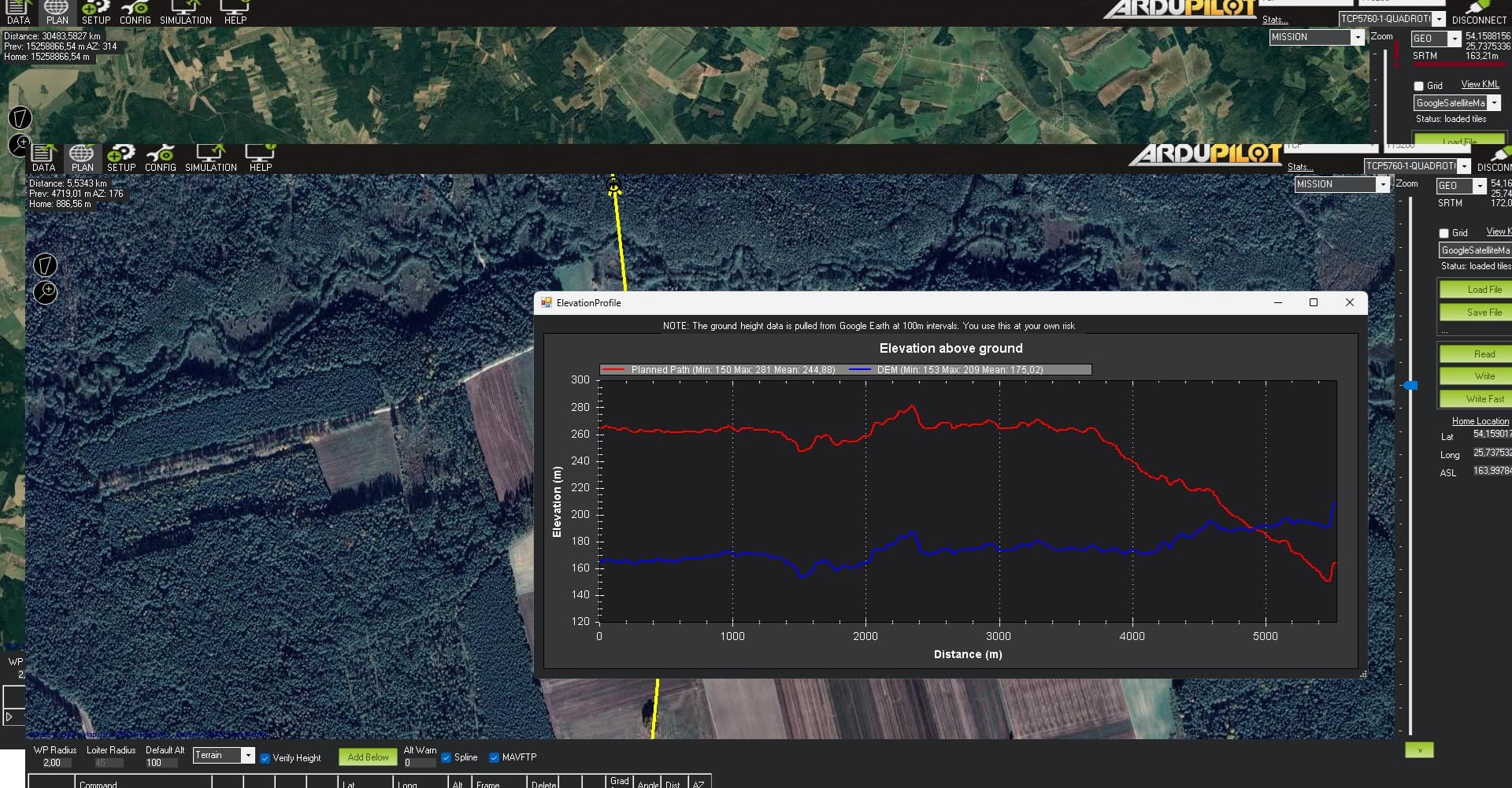
For a mission like this I would suggest planning in “Terrain” mode, and that will base the flight on SRTM/Google elevation data. The resolution on that isn’t great, but if you’re flying in farm land and you are flying at a reasonable altitude (example: 60+m AGL) then should be fine. Mission planner will display an elevation graph (in the Map Tools menu) to show you your flight plan so you can check for errors.
You could plan in “absolute”, meaning the altitudes are all relative to sea level. Technically this should work just fine, but unless you’re really familiar with mission planning these types of things the chance for human error goes up a lot.
1 Like
I wroted 2 missions as exsample, first wrong one - which actually shows my problem and second one is as i understand your advices. Did second mission 100% good? Just don’t wanna risk and try to double check everything 100 times
and this one looks good. Did it this exsample wroted good, or i miss something?

Thank you very much for your help guys
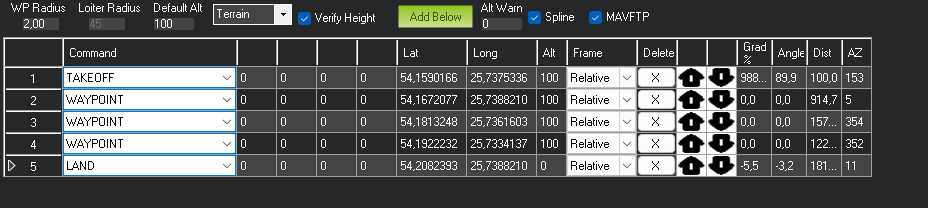
The second plan looks good, but for safety I would make two changes:
1- Change all the waypoints to “terrain” rather than relative.
2- Add one more waypoint that is really close to your landing location. The way you have it planned now the drone will slowly descend from command 4 to the the landing location at command 5. This could make things exciting if there are any obstacles like trees or cables close to your landing location.
You can also consider trying this with the simulator before flying it. It’s a good step for piece of mind.
1 Like
If i change everything to “terrain” - did it will consume more battery power? Just want to be sure that copter will be able to fly whole distance. That why i thought to made straight line on “Relative” and add only one ( 2 points at the end of the mission as you mention just for safety reasons and more linear landing) point on “terrain” that copter would understand where he is. Main point to create most safe fly to battery saving and landing not on straight line from 100 meters to 0 straight
If power is an issue you should test that duration before you launch it. Also look into setting up rally points because if the drone goes into RTL for some reason you don’t want your 5.5 km mission becoming a 11km mission. Terrain may use a bit more power in theory, but that location looks pretty flat so I doubt it will be significant. Wind will probably be a bigger player on battery life.
The additional waypoint at the end can be at a lower altitude to set up a descent, but without it the last few meters of the flight as planned without it will have the drone flying just a few meters or less above the ground till it reaches the landing location. That additional waypoint could be directly above the landing location at 10m, then the landing command will make the drone descend straight down. This way you’ll have a nice descent from 100 to 10m, and then a clean landing.