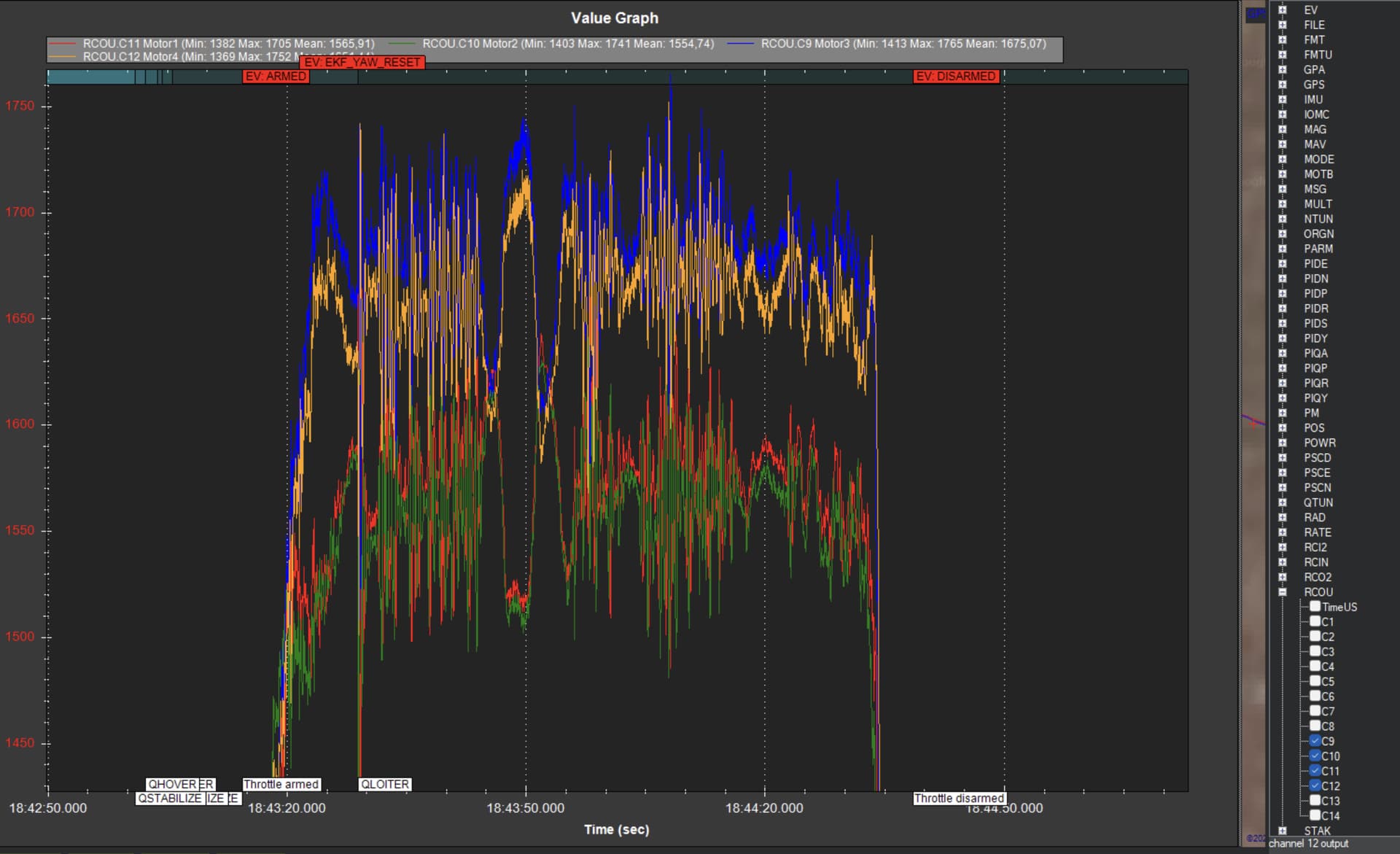
Hi, We are devoloping a VTOL with H frame . There is a pwm problem with 2 quadmotors ( motor 3 , motor 4 ). These motors gives more pwm signal than the others. We made sure that the motors alignment are properly or Vibration values looks okey. Also VTOL fly stabile. Does it cause a problem with this pwm difference.
The center of gravity is not in the geometric center of the motors or the propellers are not symmetric in thrust
motors 1+2 and 3+4 are grouped. is this yaw imbalance? if so, check the frame flex. a typical copter h-frame can actually be “rotated” compared to a vtol plane where the motor is mounted on the wings, causing adverse moment vs. favorable moment. when the frame twists due to thrust, make sure it causes a favorable moment rather than an adverse moment.