I have a Heewing T1 VTOL with Arduplane 4.3.3 and it crashes sometimes when QRTL is envoked right when the plane is going in transition from CRUISE or FWBA to Qland. For example 4 out of 5 times it lands as expected, and the 5th time it seems like the autopilot firmware is crashing and the plane goes in some sort of a emergency mode and only descends the plane rapid in some sort of horizon mode without any control away from the home location.
I now for 100% sure with Q_WVANE_ENABLE to 1 the weathervaning option is causing this effect, because I also tested this with weathervaning off for 20 times or more in a row without any problems. With weathervaning on it never is succesvful for more than 3 or 4 times in a row and than it crashes.
No, it’s not.
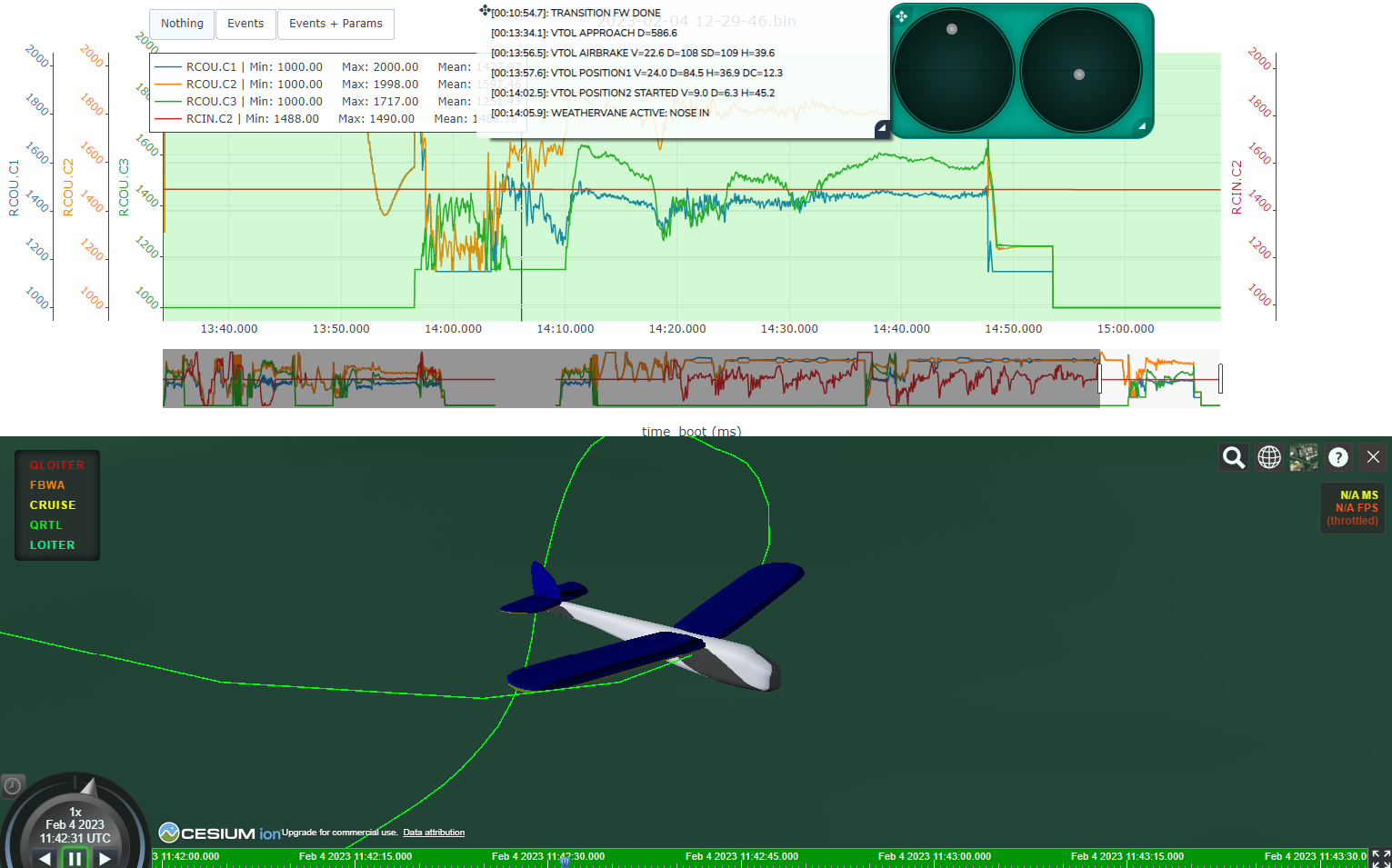
A closer look in the log file shows everything is fine until the pilot forces the vehicle in flying backwards. See the black circle in the plot. It results in flying backwards with up to 2.3m/s, where the rear motor maxes out at the lower throttle limit. See the green arrow. As follow up the plane can’t keep level anymore and pitches down (crash).
What happened?
The pilot exceeds the flight envelope of the vehicle.
Hi VRquaeler, Thanks for the explanation, but the flying backwards appearently is a result of the QRTL itself, I didn’t touch the controls and let the autopilot do it’s thing, so this means the autopilot itself exceeded it’s own flight envelope?
I still do not understand that with weathervaning off the problem is completely gone, I tested it by now for over 30 times with QRTL and didn’t had any issue so far. But with weathervaning on it crashes almost every other 4 times, exaclty when I see the “weathervaning active” on my transmitter in the Yaapu telemetry script.
Basically I see the problem starting when the autopilot gets into the weathervaning mode, and it fails to recover itself after this, the autopilot becomes unresposive to manual input when this happens.
Couldn’t it be that the weathervaning params are to aggressive to cause this issue?
As you can see the problems started right after the weathervaning got active
That’s different from what the log file shows.
From my point of view (the red trace in the black circle of my plot) shows RCIN.C2. Someone is pulling back the elevator stick.
Looking to the last part of the log all I can see is a complete and soft landing. Maybe I don’t understand your problem with the supplied log file.