Plane info
Pixhawk hardware ardupilot v4.05
airplane is a quad motor setup with a tilt servo control two motors at front.
In Qloiter mode, we were turning the model to the wind direction and lifting it up to 25-30 meter before we press the button to switch model to FBWB mode.
After switching to FBWB mode, the model change direction about 180 degree before it start to move. This is a very strange behavior to us.
Is there any parameter that we did not set it correctly or we should use another mode to make the model airplane to fly from stationary Qloiter mode to a normal flight mode?
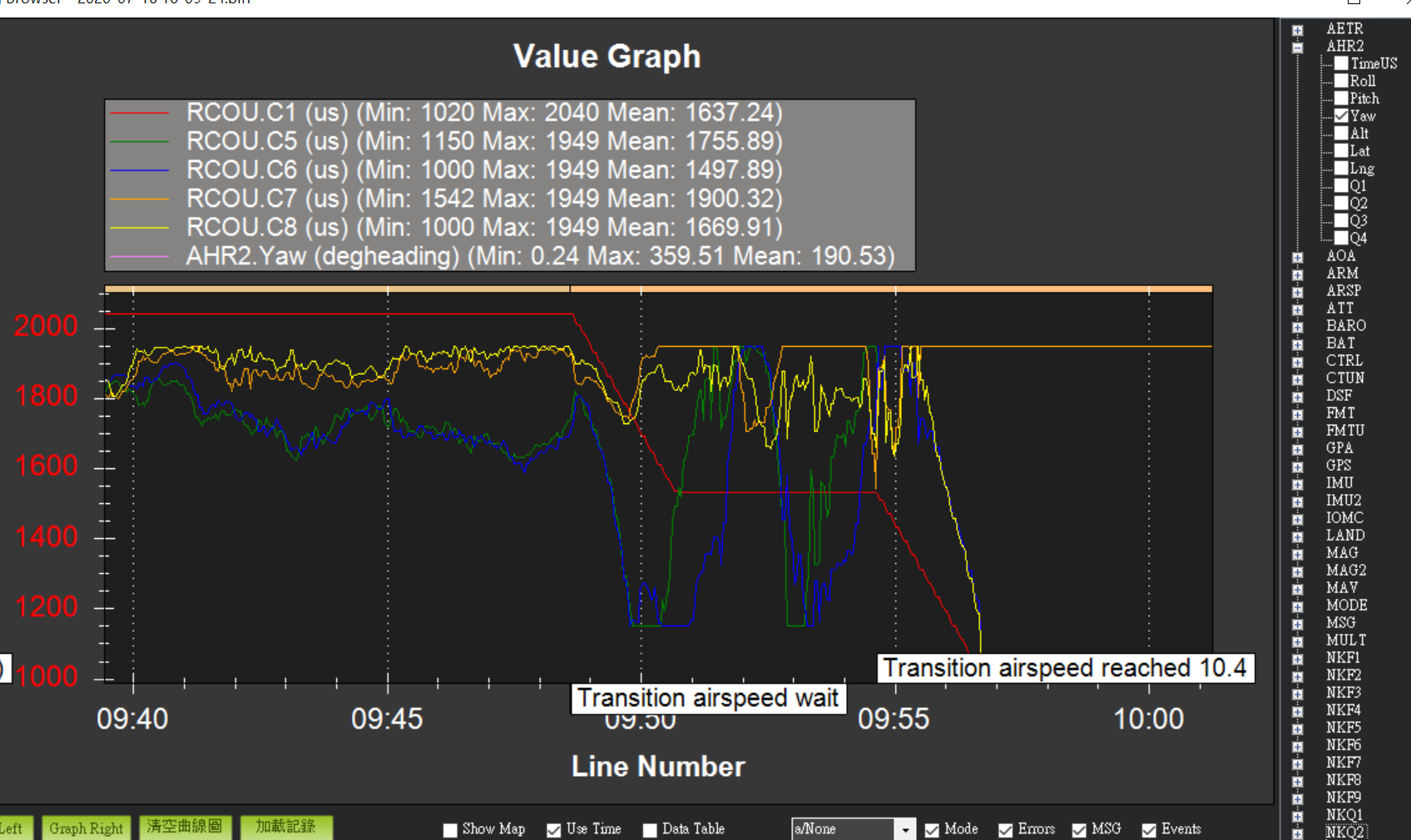
Here is the motor PWM signal change in parameter mode! bk4