Hello vtolbirdeye,
I’m happy to see another MSH transformation in VTOL. It really looks very strong structurally. I would increase the distance between the CG and the rear motor >> the rear motor will stabilize the model better and consume less.
I would start with MP; then you will discover QGC.
Do not be afraid with Pixhawk & Arduplane. Any questions that arise will be happy to help you.
Hi Atico,
Thank you for your response.
The distance of the rear engine from the CG has come out so that the CG is right. The rear engine function I understand … I will try to do nothing about it.
For the sake of interest, I also adjust the “Big Brother” 1800 mm Skyhunter as VTOL but the Quard Arrangement Video
Best Regards
vtolbirdeye from Slovak Republic
Thanks for posting your project and build in such a high details, I went through your documentations at least a hundred times because I’m also building the Mini Skyhunter but in quadplane (two forward motors tilting for fixed wing flight).
May I ask that with your motor-prop config and battery what is the max or average flight time and stall speed in forward flight?
Thank you for your help, those numbers are good baselines for me because I have a few similar motors and exactly same propellers but currently I’m in the designing period of build. MSH will one of my workhorses so for me autonomy is a primary goal.
I’ll upload some updates later as I progress with the build.
saludos Atico Aticof estoy armando un Vtol 3y en un x8 skywalker me gustaria alguno ayude con los parametros para este modelo y de ser posible el firmware ideal tanto para la pixhawk 3dr y la cube naranja ya que espero la cube me llegue pronto
gracias por sus publicaciones ayudan mucho
Hola Wilmer, los parámetros compartidos en mi web del MSH te valdrían inicialmente pero seguramente debieras personalizar algunas ganancias para el X8.
ok claro hay que variar algunas cosas atico cual es el link de tu web ? no la tengo amigo mío
este vtol es para nuestro servicio de bomberos nos será muy útil ya tenemos todo solo falta unos parámetros confiables y debido a tu experiencia nos tomamos el abuso de solicitarte y la verdad disculpas por eso a la vez gracias
Bonjour Artico,
Avant toutes choses, je vous félicite pour votre projet Mini-Skyhunter en VTOL Y3 et votre gentillesse à répondre.
Je suis nouveau sur le site … Ma question est la suivante : j’ai acquis un Skyhunter 1800. je souhaiterai le modifier en VTOL Y3 avec inclinaison des 3 moteurs, sur le même principe que l’aile volante X8. (2 moteurs avant vers le haut et moteur arrière vers le bas ) Quand pensez-vous ?
Cordialement.
Robindesbois[date=2020-11-21 timezone=“Europe/Paris”]
Hola Robin de los Bosques, es una buena opcion. Utilizar tilt-rotor siempre es penalizar en peso. El motor trasero podria ser fijo, no Tilt, pero tampoco es mala opcion los tres motores Tilt.
Bonjour Atico,
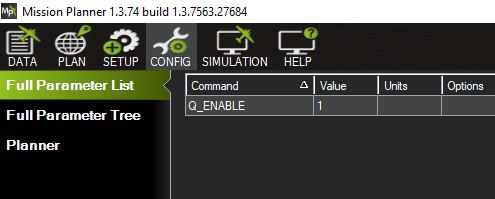
J’essais de faire la même chose sur mon Skyhunter 1800, mais cela démarre mal ; je n’arrive pas à trouver le 1er paramètre (essentiel ! ) Q_ENABLE dans la liste, j’ai pourtant passé mon contrôleur APM en V4.0.7 .
Ce qui m’inquiète en haut à gauche de l’écran de Mission Planner 1.3.74, s’inscrit : " build 1.3.7563.27684 ArduPlane V3.4.0 (c1fc5a44) "
Je ne suis pas près de le faire évoluer en VTOL ! Bref, on garde le moral dans cette période confinée.
Cordialement,
Robin des bois (08-12-20)
Hi Aticof,
I’m very interrested in your project and building the same one. It is very well documented, unfortunatelly for me it is in Spanish.
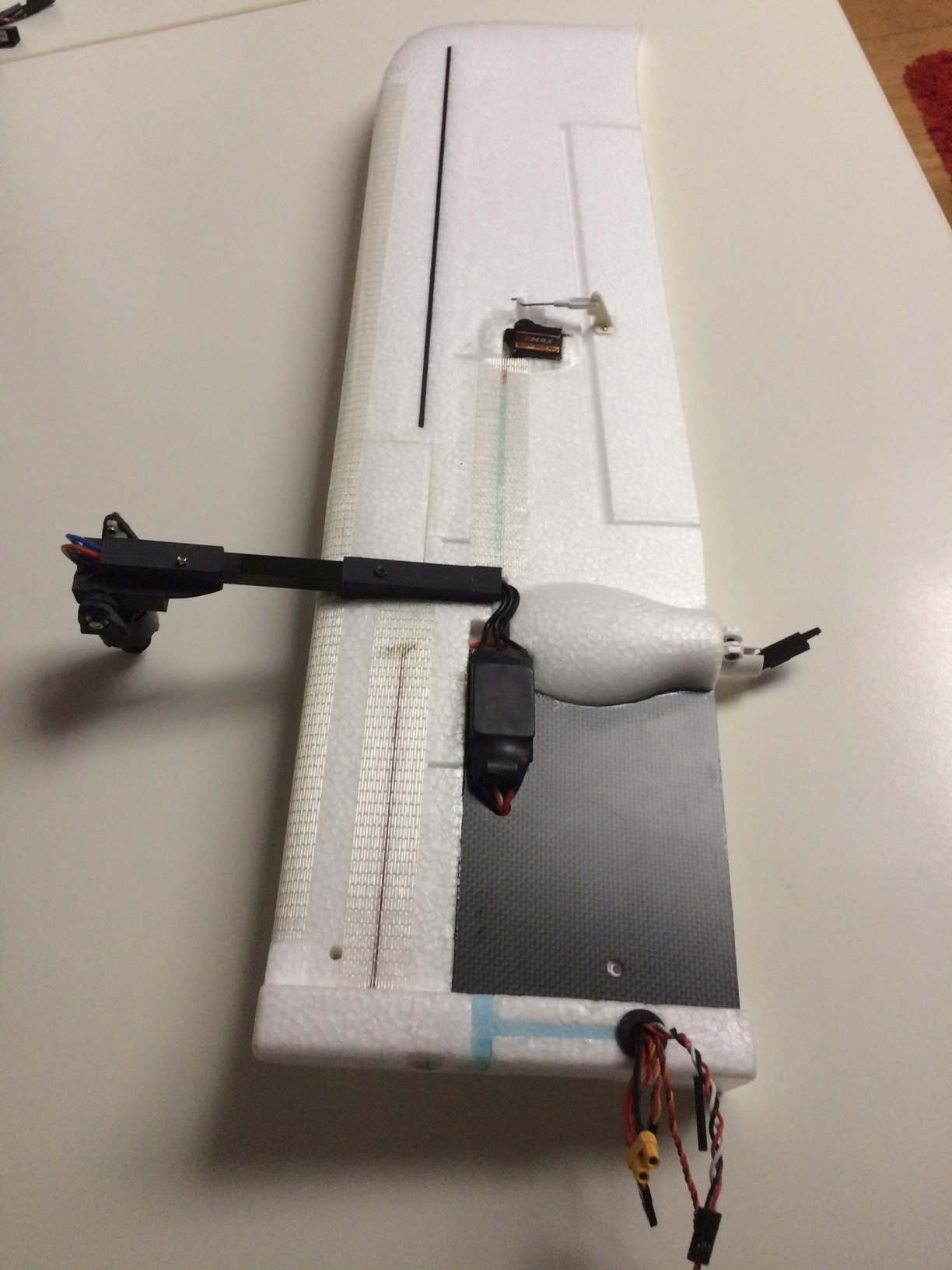
I would like to ask you one thing I didn’t find on any picture - where are placed ESCs for front motors?
Ssorry, I have checked and I do not have any photo of the position of the battery. and now I have the drone at 300 kms. But try to back up the battery as much as possible
First of all, calibrate ESC, if with Q_ESC_CAL = 1 you are not successful then calibrate it with the additional method connecting them directly to the Tx RC