Hi folks - I have a FT Bronco VTOL on Plane 4.1.7 and when I transition from hover to forward flight it seems to bumble along just below the min airspeed (10m/s) and takes forever to complete the transition despite this ridiculously overpowered piece of foam board being capable of 25m/s+ and unlimited vertical flight on the two forward motors alone. This is duplicatable on every single flight with little deviation.
Q_TILT_RATE_DN is 60 and I have no other settings that I would think would cause it to back off instead of powering right through ARSPD_FBW_MIN at 10m/s. I often just switch into manual or acro prior to the transition because it’s pretty far away at that point.
Being over-powered, I have MAX_THR set to 85% and Q_M_PWM_MAX to 1700 and as mentioned it goes like a rocket in manual/acro modes. THR_PASS_STAB is set to 0. I have BATT_WATT_MAX set to 800 and it barely breaks 350w until the transition is complete and FBWA finally forwards my throttle input.
The log clearly shows that after the initial tilt and during airspeed wait it actually backs off the forward motor thrust for nearly 5 seconds as if it is no hurry to get there, acting like the min airspeed is the destination speed, not the minimum. Having multirotor motors and props it should be reaching 10m/s in less than like two seconds or less if I increase the tilt servo speed.
I have tried to duplicate this with the E-flight Convergence SITL realflight model nearly all of the same params as but it always blasts right through the min airspeed with the transition thrust at full throttle as expected. Since I can’t [easily] select the same 4.1.7 firmware with SITL I acknowledge that I’m simulating this with newer firmware and there must be some change in the code that deals with this. Normally I’d upgrade the firmware to the latest but the infernal USB connector has broken off this f405-wing so I can only access it via the sik radio.
I was thinking that perhaps it is backing off thrust to avoid increasing altitude during transition (Q_TILT_MAX is at 45) but the alt logs do not reflect a significant jump in altitude (or do they?). Should I try increasing this parameter to perhaps 55 for more forward speed?
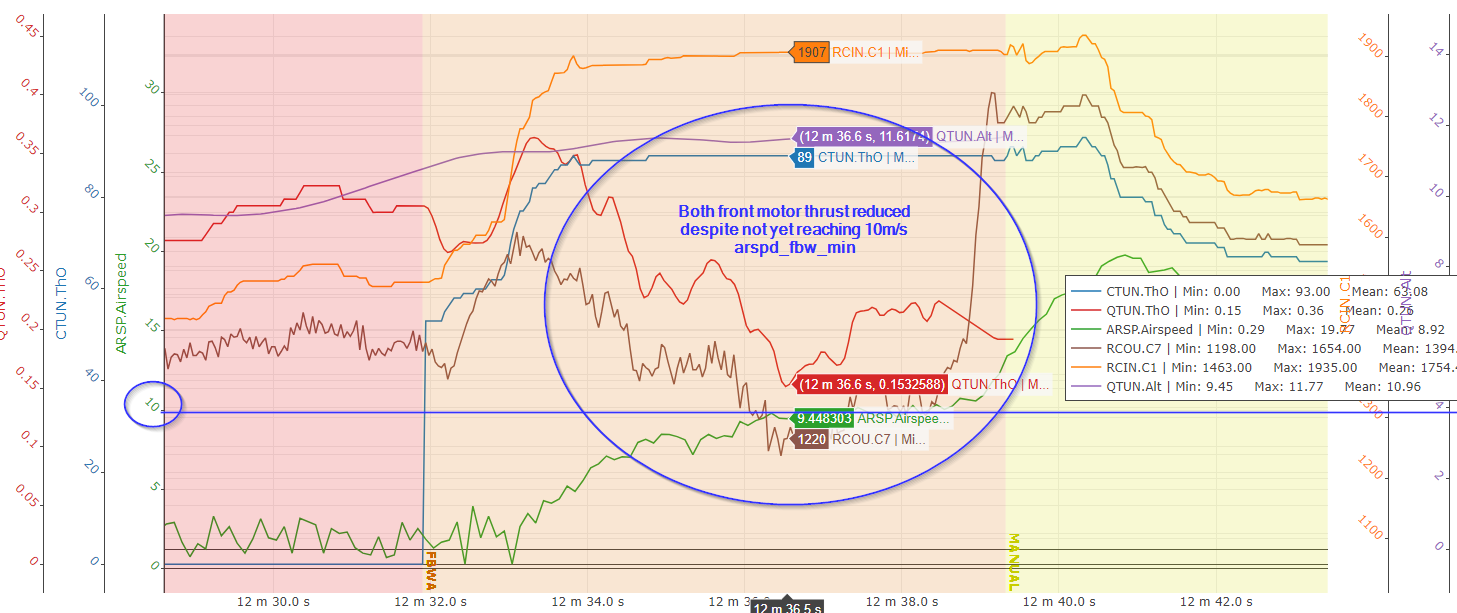
For clarity I only show only a single front motor but the other front motor matches exactly the same pwm.
As always I appreciate this amazing code and how much I’ve learned just from reading these forums.