I have a question regarding VTOLs that I hope someone could help to solve.
When doing a mission, if the next waypoint is close to HOME, our VTOL (tiltrotor) starts to transition as soon as we switch to Auto mode, even if we are on the ground. It looks like it doesn’t take into account the height at all, neither the airspeed… If the first waypoint after takeoff is far away, this doesn’t happen.
What could be the cause? A bad parameter maybe? I tried in SITL but it works just fine with the same parameters.
Unfortunately I don’t have answer for your problem but looking at your log files i think we have experienced very similar occurrence.
Our VTOL plane was flown in FBWA and as soon as Auto mode was enabled the aircraft looked like it just forgot the importance of altitude and crashed while trying to reach first WP of the mission.
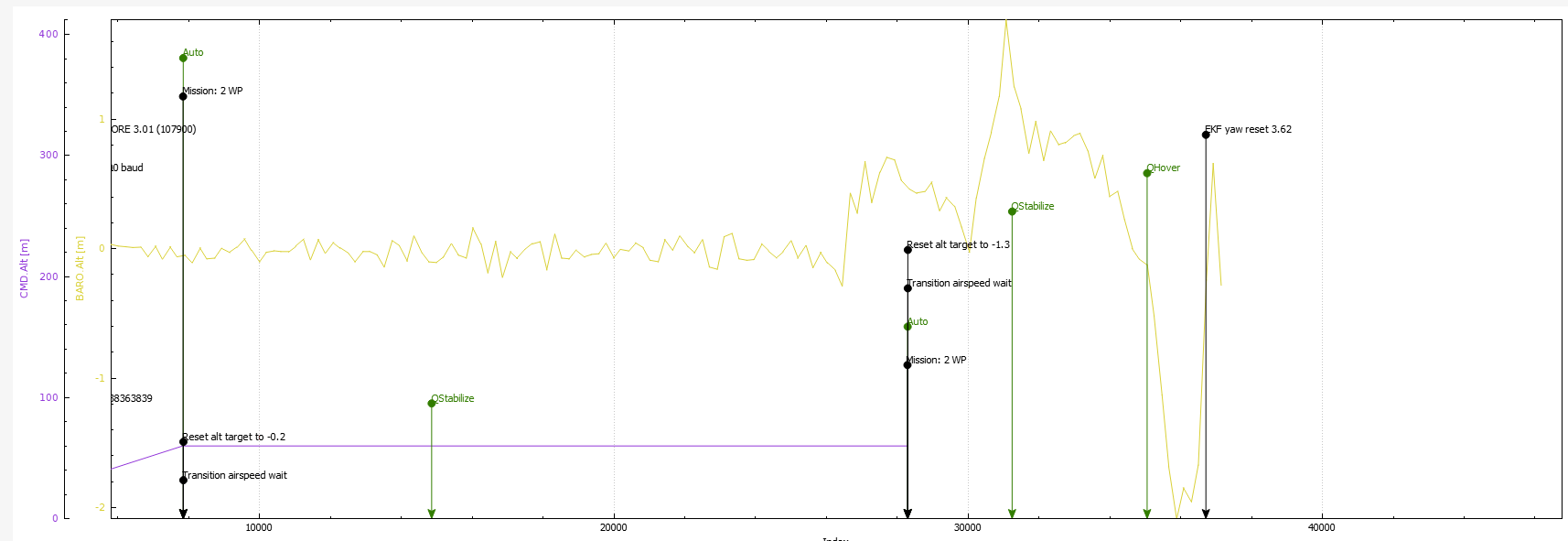
Notice how CMD.Alt is just not there anymore after Auto mode is enabled. In our case the aircraft just banked at ok speed and never even tried to use throttle or elevator to maintain altitude.
Thanks for your reply, and sorry to hear about your crash…
I’ve been looking around a bit more and I’m not sure if that’s the problem in our case.
Here is another log where the same thing has happened: https://drive.google.com/file/d/1-dM4khNhBavvCWF7ldFytaT_SYhbjJWS
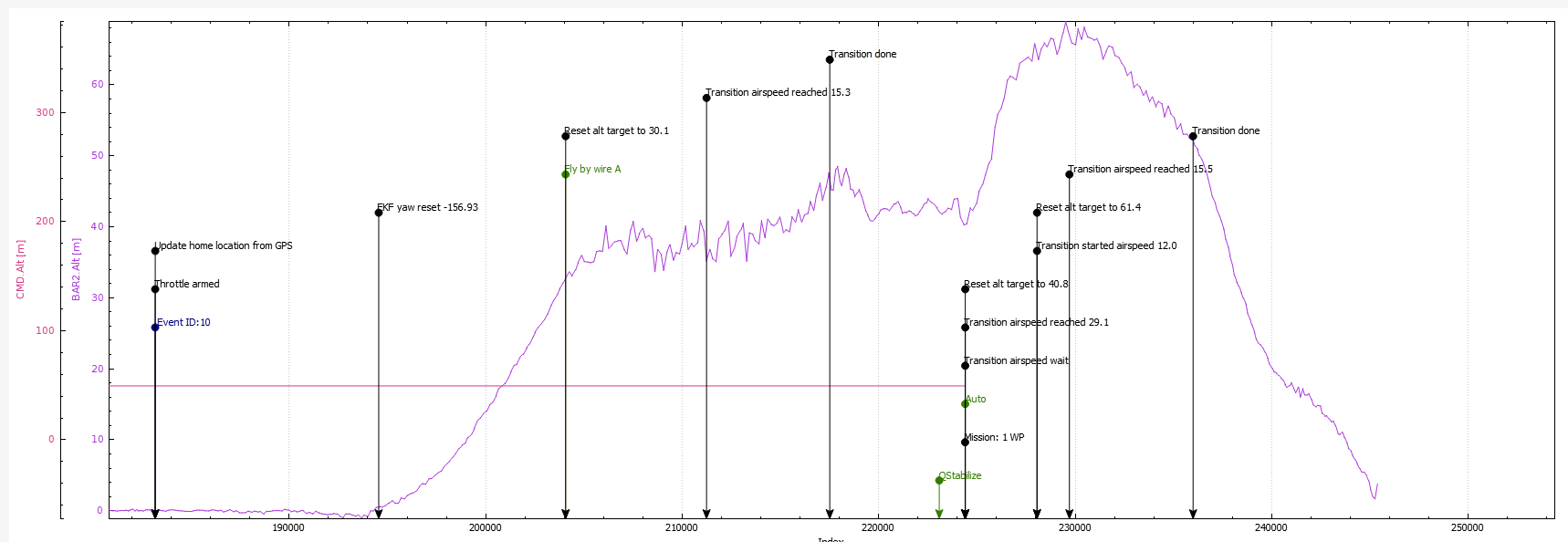
And in this case there is CMD.Alt all the time. But as soon as we switched to Auto, the drone started to transition on the ground. Since it had a downhill in front of it, it managed to take off in plane mode and flew smoothly.
Looking at the messages list, it jumps straight to WP #4, without doing the takeoff at 40 meters nor WP #2 at 50 meters altitude.
I think that may be the problem, since this transition on the ground apparently only happens when next waypoint after launch is closer than Q_WP_RADIUS. Unfortunately, we can’t afford to do extensive testing because the risk of an accident is too high and it’s a rather large drone.
By the way, what software do you use to make those graphs?
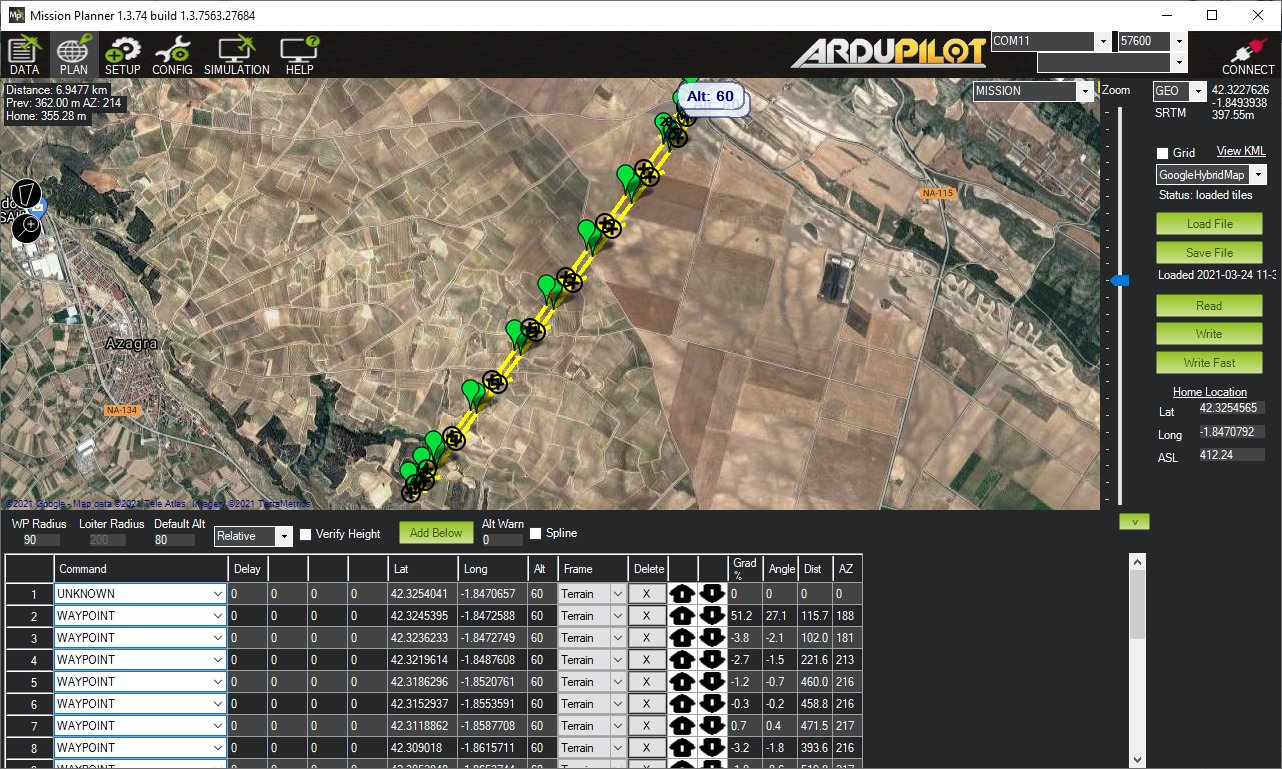
If I load up your mission in Mission Planner v1.3.74, I get an “UNKNOWN” command in the first and last positions. What GCS did you use to create the plan?
We use Mission Planner.
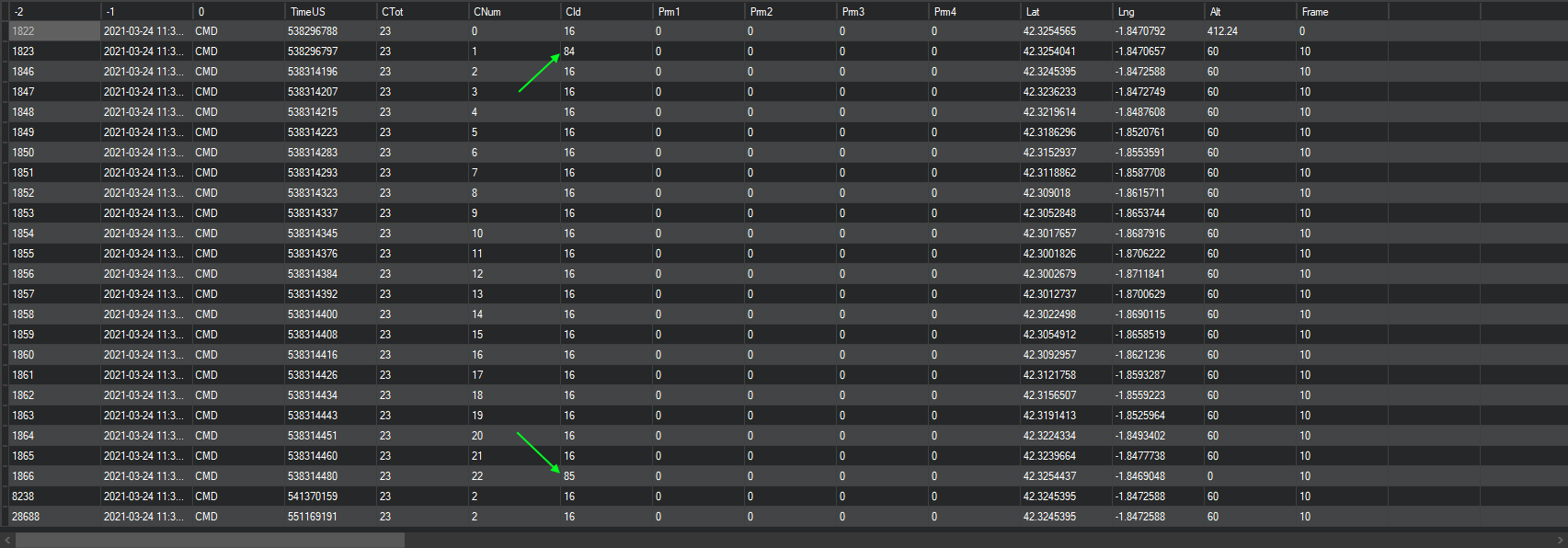
The first and last commands are VTOL_TAKEOFF (#84) and VTOL_LAND (#85) so I guess it’s UNKNOWN because you’re not connected to a VTOL.
I think there is something else going on. If I load my old VTOL plan into the same MP version, not connected, both the TAKEOFF and Return_To_Launch commands still show up fine. Why would you need to be connected to make a mission plan?
One thing that is different is that I got your mission plan from the .bin file. I wonder if reading it from the Pixhawk after loading shows an issue or is it just some error when extracting it to the .bin file.
If I understand it correctly, it wouldn’t make any difference.
If the bit is set, it should take off at 60 meters above its current position. If it is not set, it should do the same since Home is at the same location and therefore the same altitude, so it would takeoff at 60 meters above Home.
Yes, I am starting to agree with you now. I have another example mission plan for a VTOL that is proven to work. It uses a vtol_takeoff command 84 at the beginning and a return_to_launch at the end.
In Mission Planner, it does display “UNKNOWN” for the 84 command so I will test your theory that you need to be connected before MP will recognize the command.
Also, on your original post where things work if the first waypoint after takeoff is farther away, this has also been reported for tilt-rotors in this forum.
I found the “connected” issue description in the Wiki. It’s been a while since I have done AUTO missions so it is good to learn new features.
Mission Planner (MP) exposes the full subset of commands and parameters supported by ArduPilot, filtered to display just those relevant to the currently connected vehicle.