Hi
I almost crashed the drone. I need help to prevent such problem in future.
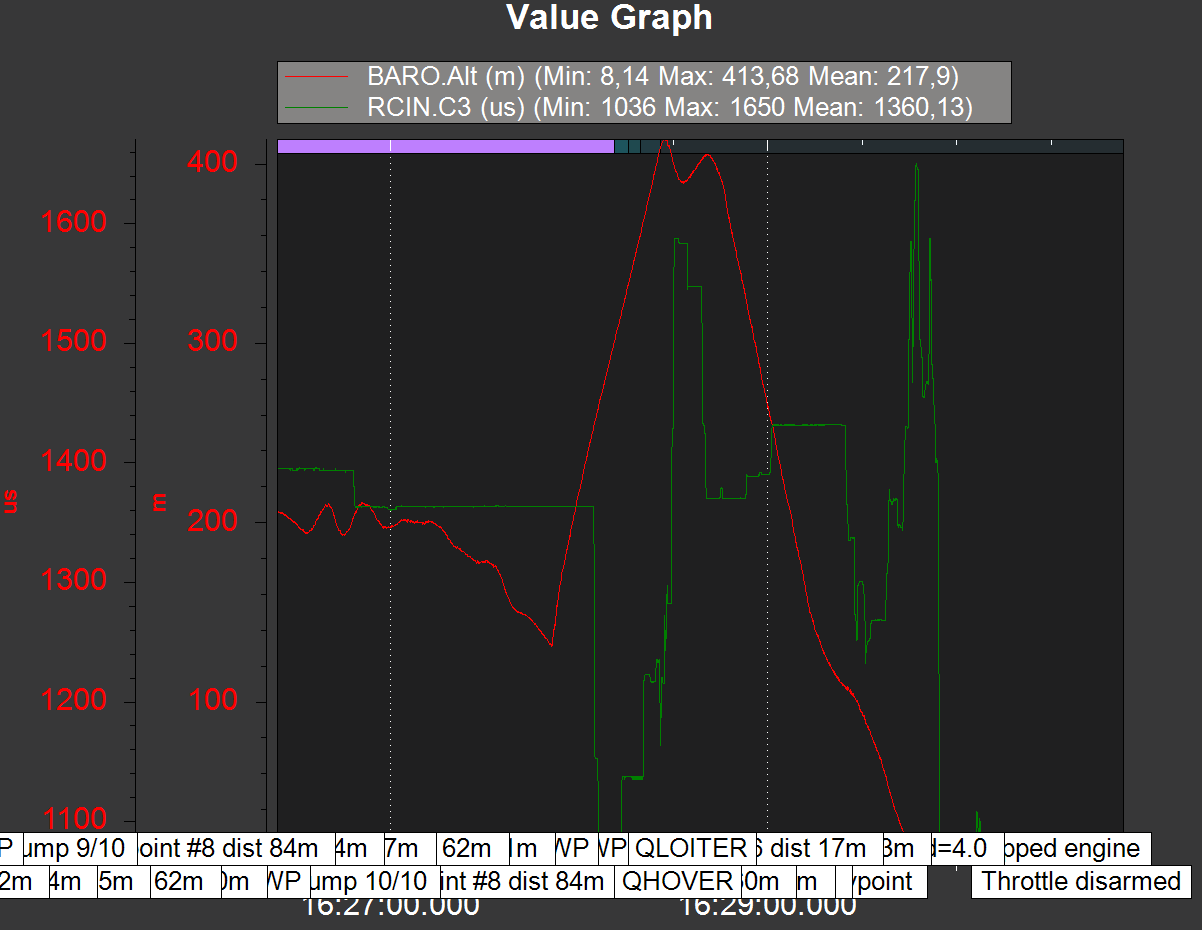
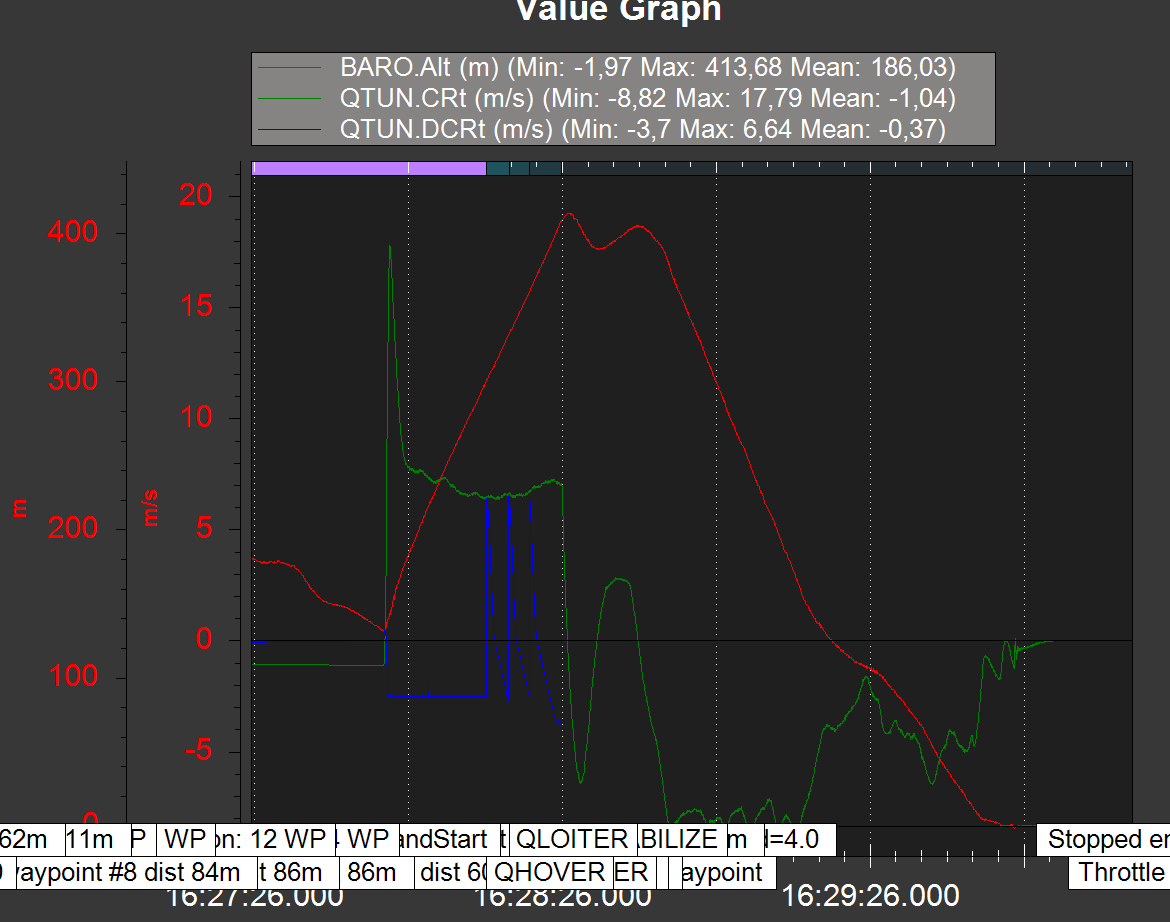
At final stage of mission VTOL starts climbing super aggressively at vertical speed 8 m/s instead of landing.
I tried to change to QHover and QLoiter modes without any results. It didn’t respond to throttle stick. Only switching to QStabilize allowed to control altitude at 400meters and I land it without crash.
.
.
.
I checked logs and the only problem that I could see is difference in QTUN.Crt and QTUN.DCrt.
I’ve made a error and positioned the last waypoint too close to VTOL land. It forced the drone to make super aggressive braking. Maybe it caused the problem. Do you have any advise what is best practice for VTOL Land planning? What is safe distance for transition?
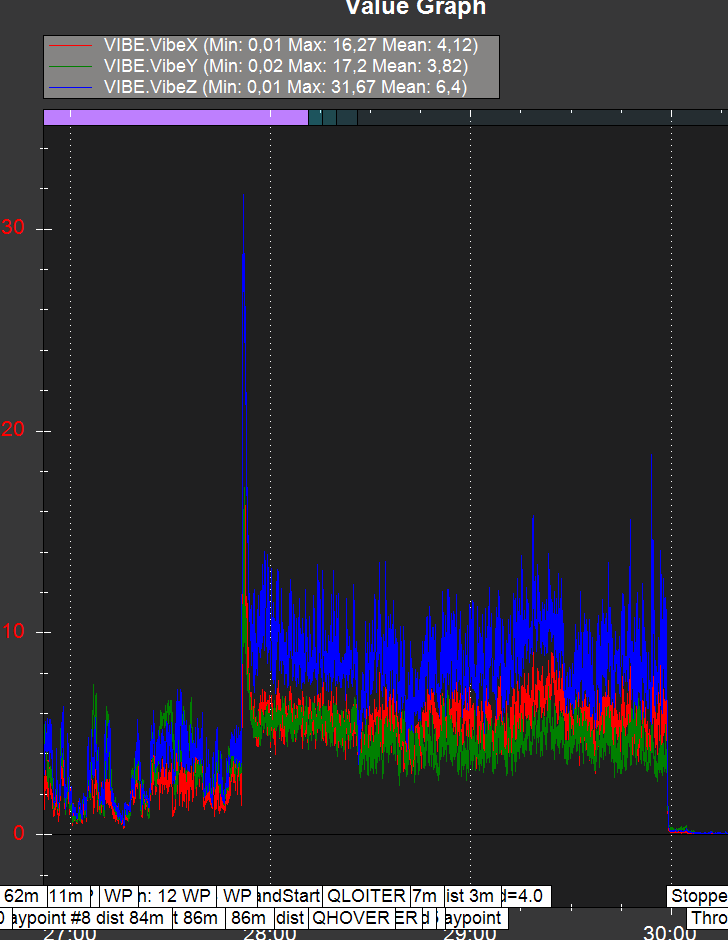
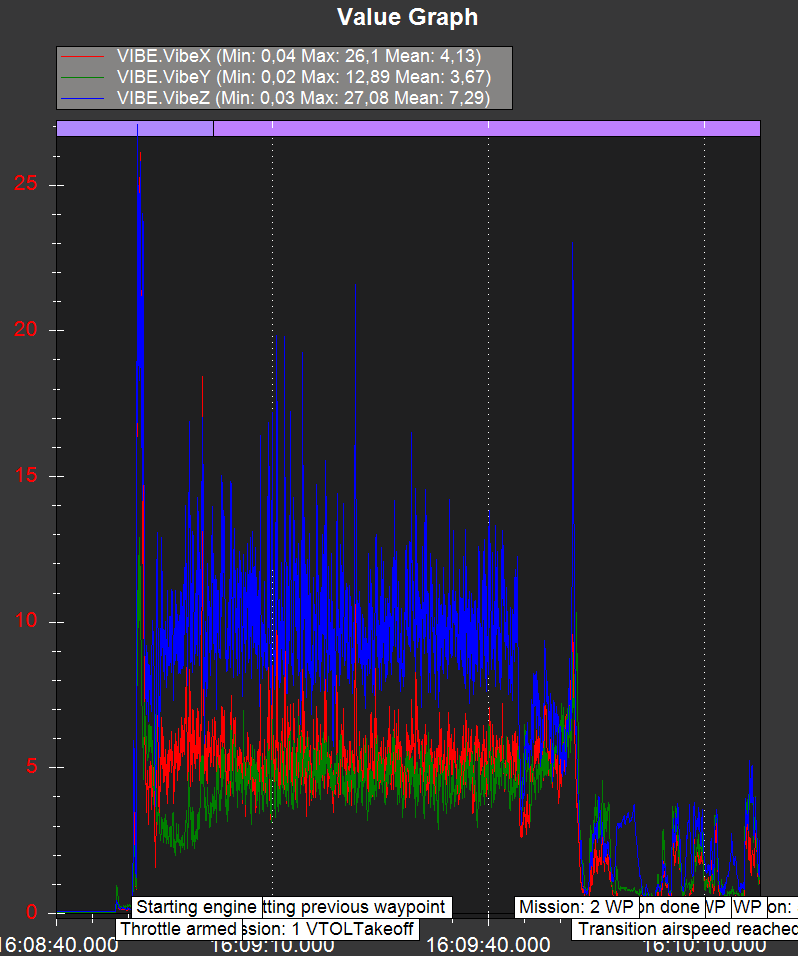
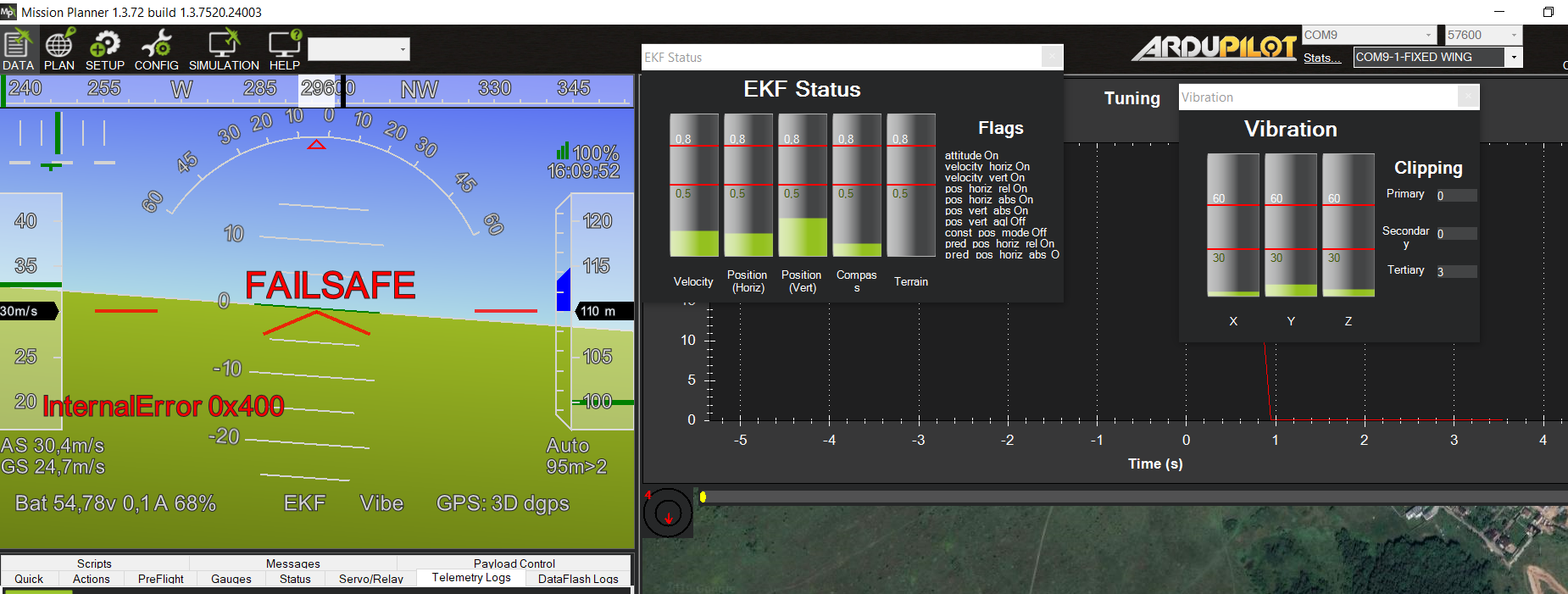
One more strange behavior at start. At the end of Quad > Fixed Wing transition it got internal error 0x400 and some strange Failsafe that I can’t find in the dataflash logs. It is available only in telemetry logs. It also pushed the motors hard at that point. After that it was always FAILSAFE and internal error 0x400 blinking on the screen.
FAILSAFE and 0x400
A
Motors high at the end of transition
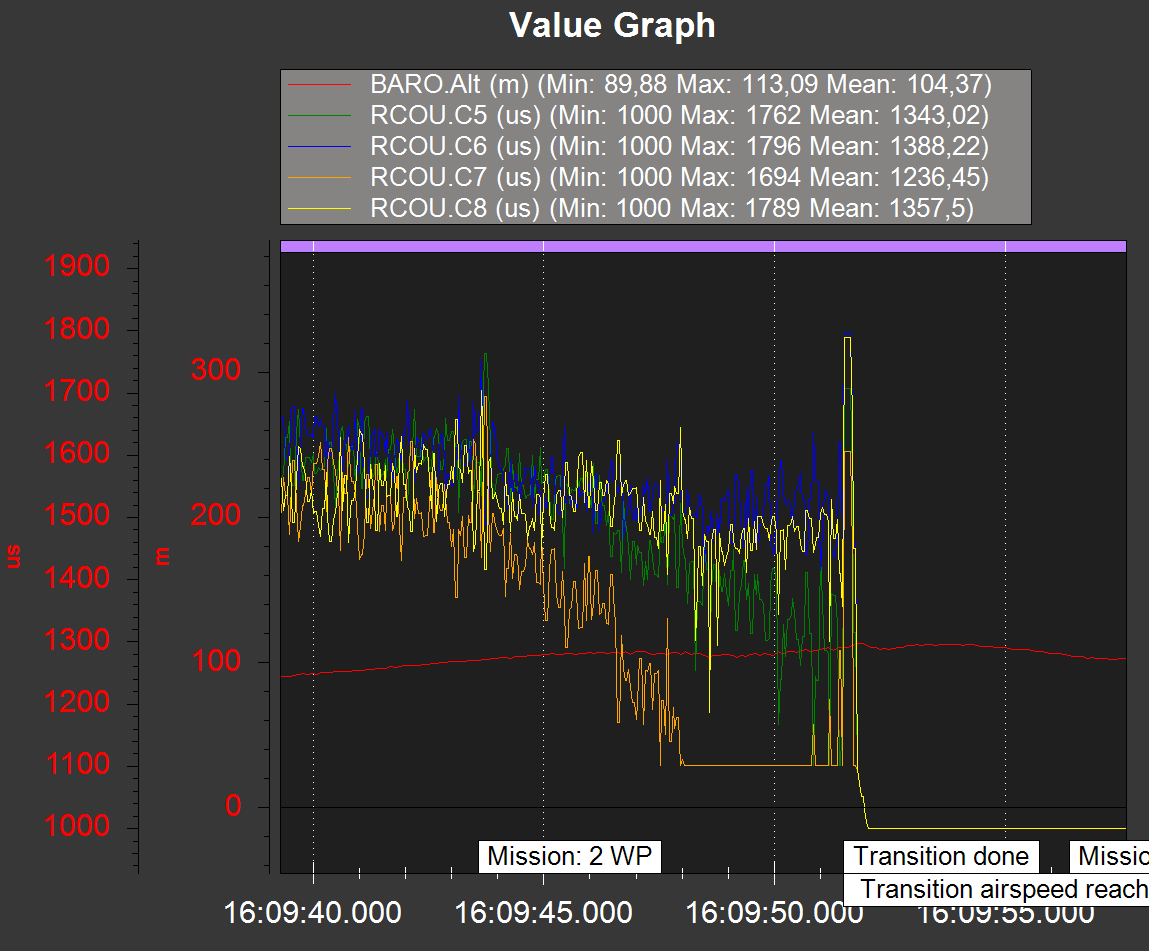
Dataflash and telemetry logs are available at
https://dropmefiles.com/zhgBl
Thank you for help