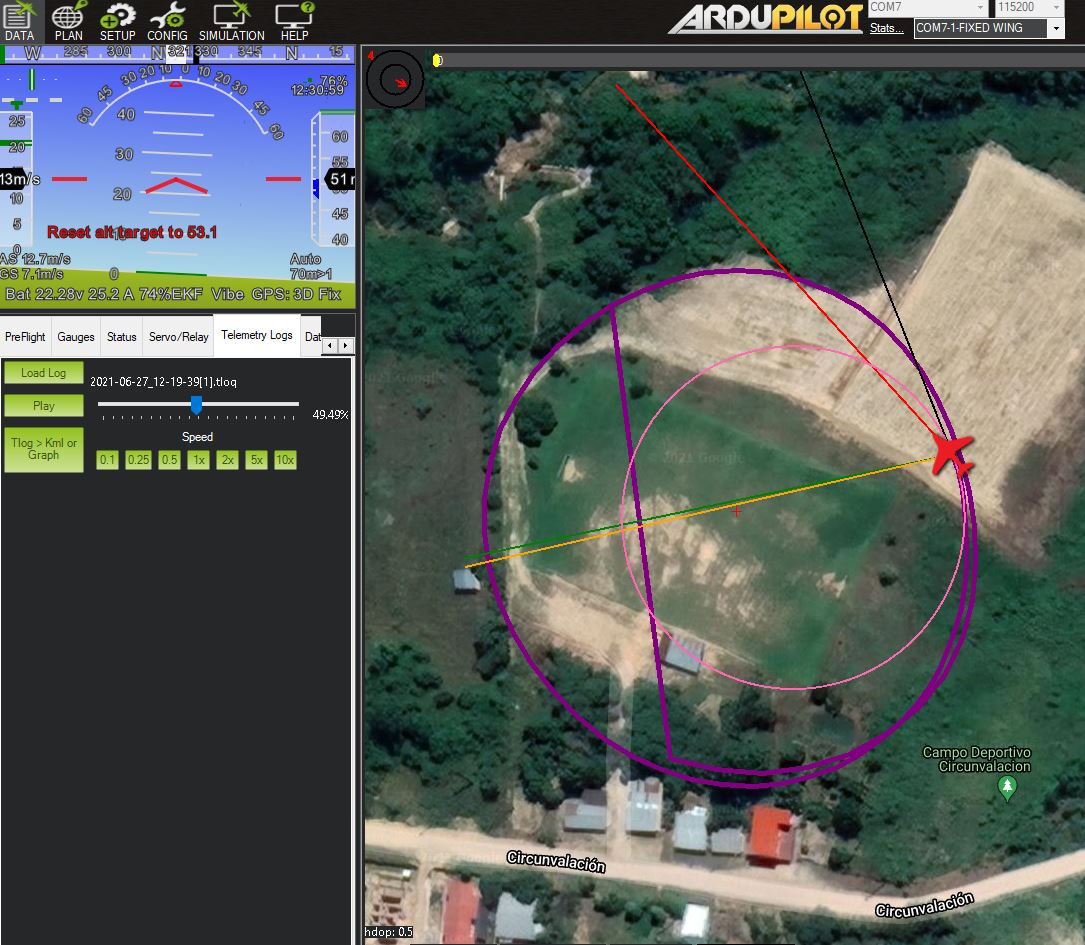
Hi everyone, I have some troubles with VTOL drone built with ardupilot. It is working relatively good, but sometimes when it is fliying in plane mode in an auto mission, turns into quad mode, it even happened when it was fliying in circles. Could it be because of EKF which in each transition say “error compass variance”? one thing that it is missing is the airspeed, could it be also because it does not has airpeed? Thank you very much for any advice.
Here the links of bin and log
https://drive.google.com/file/d/1ThD1UIlzaeolUWlCOTGAJvmsx70R3leC/view?usp=sharing
https://drive.google.com/file/d/1dKzbnVPTlcyDM8FnxYHioi93uClKoBwT/view?usp=sharing
I found this error while I was looking the log “RESET ALT TARGET” (In the moment when it fail and turn into quad mode speed 0) Do you know what does it means?
This is an interesting issue. The key to it is that TECS.sp stops tracking CTUN.Aspd properly:
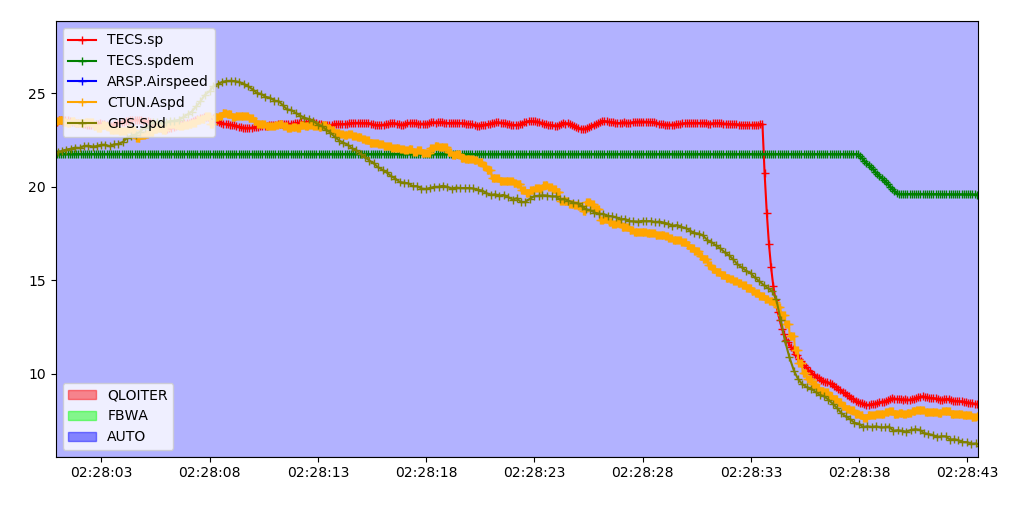
This causes the plane to slowdown, triggering VTOL assistance when the speed drops below Q_ASSIST_SPEED of 14.
I’m still looking into what could cause this.
2 Likes
Thanks tridge for check it. Looking missions flights that I setted, they all have 60meters of radio waypoint, the plane is 1.65m wing extent (5kg aprox) and it could turned not less than 70meters of radio. Could it be one cause? My Q_ASSIST_ANGLE is 65.
I’ve looked a bit more, and it isn’t an airspeed issue. The TECS.sp is off as you are not flying under airspeed control.
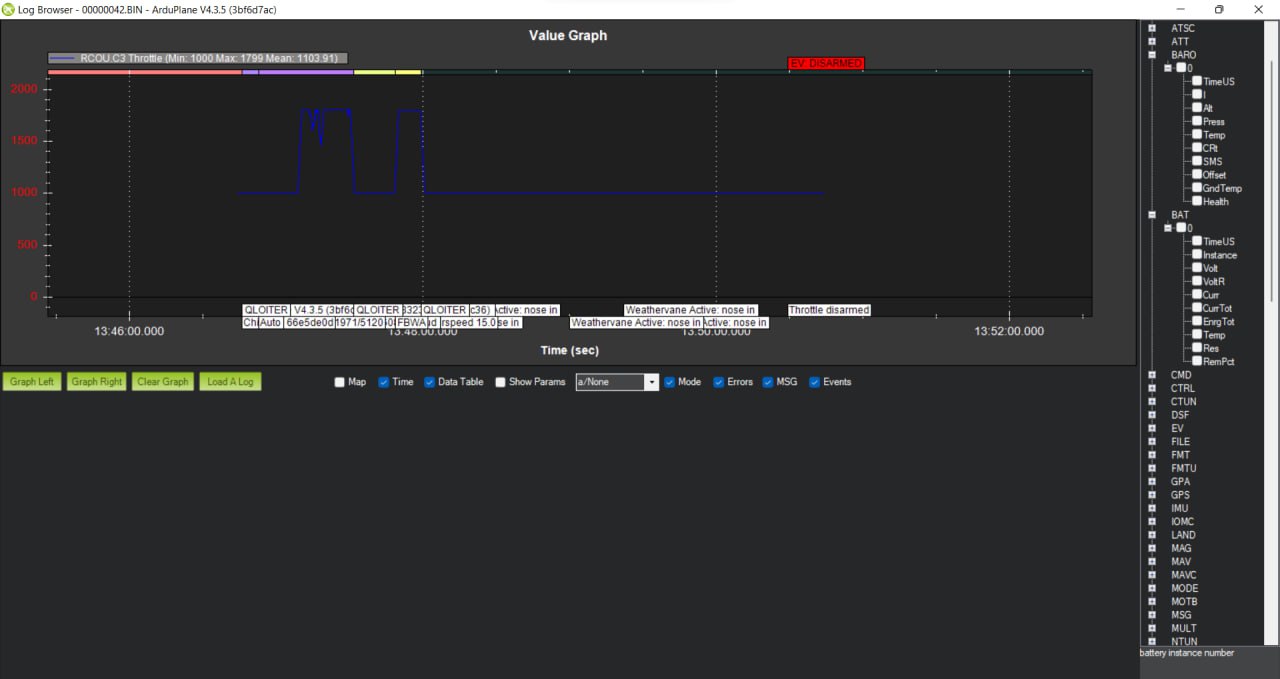
What I think is actually happening is your fwd ESC is shutting down (or more likely current limiting due to over-temperature).
Have a look at the current draw versus throttle:

You can see that the current tracks the throttle pretty well until the end of the flight where throttle goes up and current starts dropping in a nice smooth curve over 20 seconds. That is why the plane started losing height and losing speed - the forward motor stopped providing full propulsion. It is also clear from the vibration:
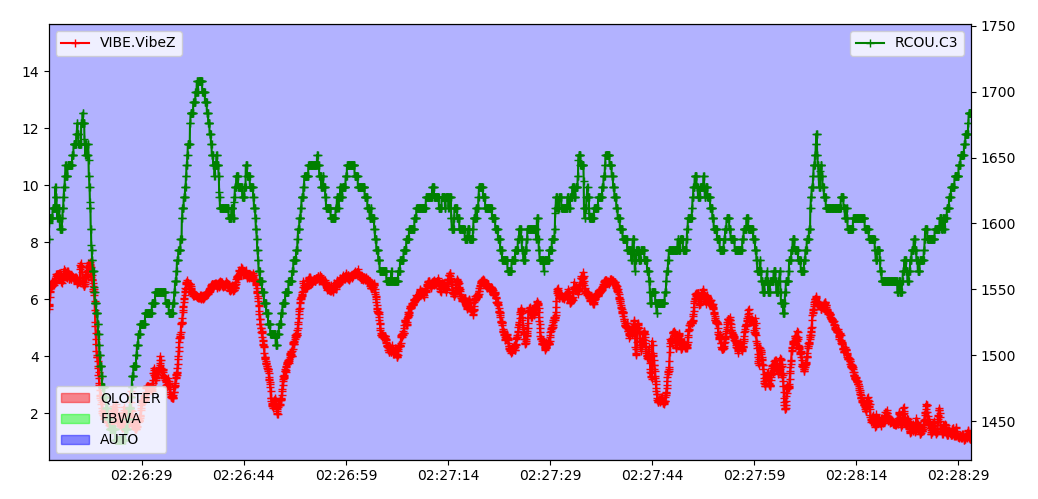
I think it is highly likely that your ESC is overheating and is limiting power to try to cool down.
How hot is it where you are flying? I see the baro temp is very high (60 degrees C).
I see. Temperature usually is between 25 - 35°C and sunny days, but GPS module is exposed to the sun. I touched it when I land the plane and it was really hot. Could I cover with something the GPS module? It is a Neo3 CUAV. Also, should I change the ESC? Thanks for take your time
I can’t tell the GPS temperature from the logs, but the key is the ESC. I think you either need better airflow over the ESC or a different ESC.
1 Like
Thank you very much tridge! I will try first with another better ESC that I have, hope we have a good weather this weekend. I will let you know how it gone
1 Like
Hi.i have the same issue.i am using a cuav V5 plus in a Vtol and in some of my flights when i do mission,the aircraft start to take of and reach to the take of altitude and when it going to transition to wing,the forward motor start to work snd after 1-2 seconds it stop and the aircraft hover with its quad motors.also the video get freezed and i have to change to qloiter mode.this is one of my bin files when this error happened
And also this is my volt and voltR diagram and motor output

I would appreciate if you can help me with this issue.