VTOL Plane: QuadPlane with forward motor
Firmware: ArduPlane 4.0.9
FC: Pixhawk2 CubeOrange
I followed the wiki to set Q_RTL_MODE=2 to make my plane RTL as a normal fixed wing and loiter to Q_RTL_ALT, and then trans to VTOL to land. But Q_RTL_MODE=2 did not have any effect. The plane RTL as a normal fixed wing and loiter around HOME with RTL_RADIUS. It never doing a transformation to VTOL. I have to change flight mode using MissionPlanner or RC to land it.
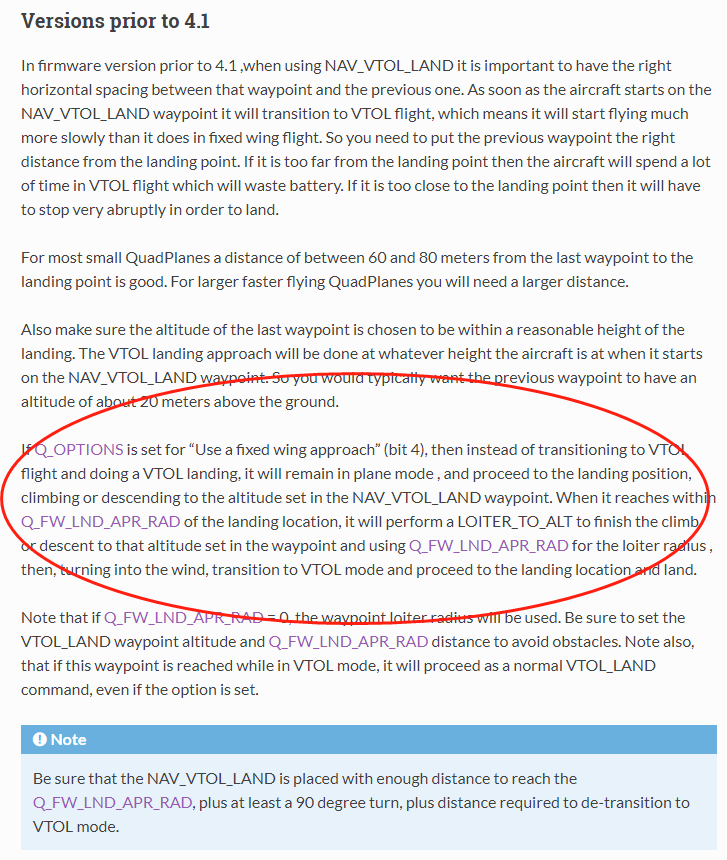
I also tyied Q_OPTION=4 as wiki said and use VTOL_LAND mission command, but I got the same result.
I compiled the 4.0.9 source code to use the quadplane simulator. Sadly, the same test got same result.
@iampete
Thanks you and I undersdand this is a part of a mission.
I tried use Q_OPTION=4, and upload a mission with VTOL_LAND command. But it’s not working. The plane will change to VTOL after the waypoint before VTOL_LAND. And move to landing positon as a copter.
Thank you @iampete, I think I just found that.
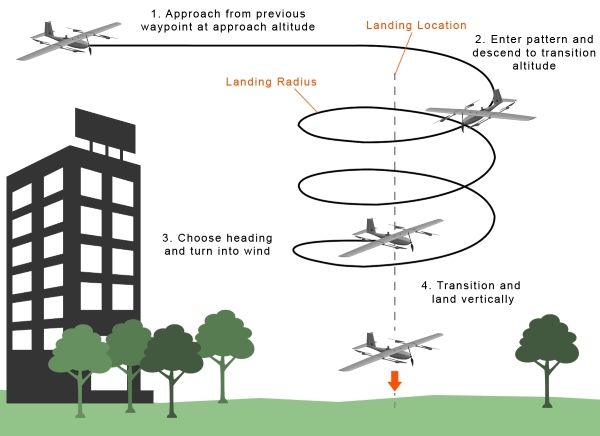
I tried this option on simulator several times, and I noticed that the transition began at the loiter circle and move as a copter, then make its head to wind (or home), not as the wiki picture shown us.