Hello, I’m new on this forum and I recently started to play with ardupilot. A fantastic resource!
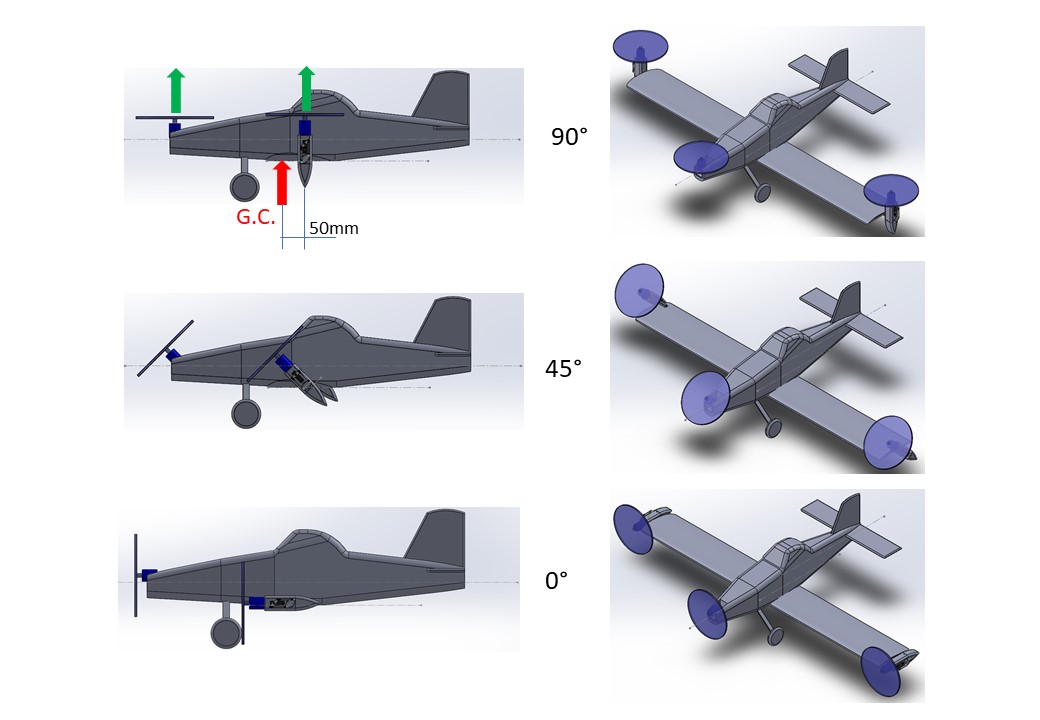
I’m planning to modify a foam plane to make it VTOL ready and I’m following to “reversed tricopter” configuration with all 3 motors fully tilting. I’m ready with mechanical design and I’ve already realized tilting nacelles that work fine.
My question is: any straight suggestion about parameters’ config. for this reversed layout? Q_FRAME_TYPE and Q_FRAME_CLASS? Propellers rotation: it seems that could work both with all 3 at same direction or front and one side CCW and other side CW: is that correct?
Any possible suggestion and information is extremely valuable for me…
Thank you very much in advance.
Paolo
As you can see the 2 wing’s motors will be only 50mm behind CG, so they will carry about 90% of model weight. Front propeller will act mainly as balancing vector.
Hi Paolo,
please allow me some thoughts on the design:
a) Motors and tilt mechanism at the wing tips require very stable and therefore heavy wings to avoid resonance flutter during hovering.
b) Are you sure that when the motors are tilted forward, the centre of gravity is safely within the manufacturer’s recommended range ?
Perhaps it would make more sense to mount the rear engines on a boom on the fuselage behind the wings ?
The rear engines should run in opposite directions.
If you are sure that you want to build the plane as a reverse-tri-tilt, I will of course help you with the parameterisation.
Due to the small number of users the reverse function is not officially supported yet, but thanks to @iampete Peter Hall reversed tri-tilt VTOL is supported by master firmware.
Dear Rolf,
your thoughts are very appreciated and needed.
Wings are very stiff, there is a carbon spar (squared section tube) from root to tip, so I’m quite confident on that.
CG will be ok when motors are tilted forward.
About reverse tri tilt configuration… yes I like that; that makes the overall result aesthetically more clean and … better ! I know that it is challenging but I believe that challenges are the reasons for our hobby.
I’m preparing now the front tilt mechanism and I’m going to order motors, escs and propellers (thank you for the clarification about rotations).
As soon as ready with mechanics your help will make the difference.
Hello Rolf!
I’m moving with hardware and I’m starting to test motors.
I’ve found already a problem: front motor has reversed stabilization action.
I mean: in QSTABILZE mode, when I move manually nose down the nose motor’s speed goes down, when I move nose up the nose motor speed goes up.
So the correction is reversed.
How can I fix that? Is it needed to reverse PID?
If I reverse pitch PID, what about elevator? (that will be then wrongly stabilized)…
Thank you in advance.
Just thinking…
reading about your experience with Mozart I understood that reversed PID issue for reversed tricopter have been fixed and working with official Plane firmware release.
Could it be that latest firmware (I’ve just updated to 4.0.6) is not more working for that configuration? Could it make sense to upload an older firmware version? If yes, could you please advise about which version did you test as well working?
Dear Peter,
thank you.
That’s strange… I know. I’ve settled as suggested from Rolf:
Q_FRAME_CLASS,7
Q_FRAME_TYPE,6
Q_TILT_MASK,11
For Vectored-yaw Q_TILT_TYPE 2
Roll correction on motors is ok.
When I test Pitch corrections I see that elevator is ok but not nose motor (reversed correction)…
Is the front motor ESC port configuration correct as SERVOx_FUNCTION=36?
Any suggestion about what to check?
Sorry to bother and thank you.
Hum, its defiantly backwards, cant see any why tho.
Can you try on Master (4.1.0), you can load with ctrl + q on the MP load firmware screen. Usually not recommended to fly with master unless you know what your doing, but it will be useful step to try and debug this issue.
Dear Peter,
good morning.
Just uploaded Master firmware 4.1.0 and tested.
Situation is not changed: nose motor has still reversed correction. Elevator correction is ok.
I faintly remember that the pitch issue did not occur after I completely reloaded the firmware new by loading rover-firmware once and then loading the Arduplane firmware again.
@iampete: Just to confirm: master is still required or is the reverse-tri-feature also included in the current stable ?



 ! I know that it is challenging but I believe that challenges are the reasons for our hobby.
! I know that it is challenging but I believe that challenges are the reasons for our hobby.





