Hello All,
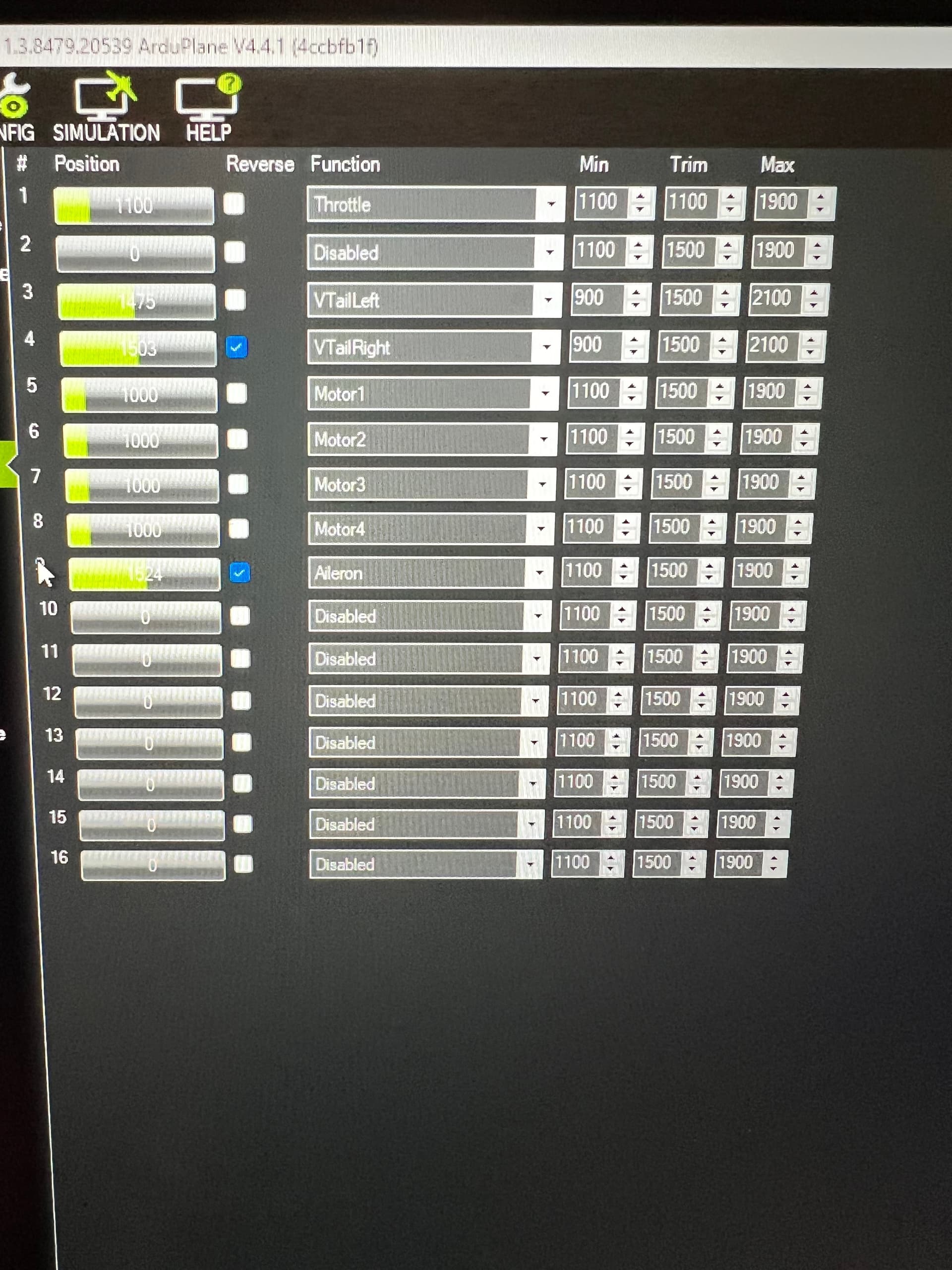
I am posting bin file and new video. Any help would be welcome. In addition to zero yaw control (not sure why-- are my outputs wrong? I dont see yaw in my rc output when i move my yaw sticks).
Bigger issue is that in Qhover, it wont stay hovering-- the plane just wants to land/go down. Even at 100% throttle on the stick, the plane wont go up and I dont hear the motors reacting to increased throttle request to gain altitude. See the video. AUW is just 4kg which is under the recommended weigh of 6kg and which should be blasting fast with the 4 motors I have. You can see the plane takes off in Qhover mode quickly, but when I push throttle even to 100% on my controller, it does not go up . I’m using a 10,000 mah lion (would current rating be an issue with the 4 quad motors? ZOHD Lionpack Max 21700 4S2P 10000mAh 14.8V Li-ion Battery
Each motor draws a max of 29 amps.) or could esc calibration be at issue?
The link to bin file is here:
video link of plane is here: https://youtu.be/_ZumYTyYSWQ