Flight Log
mission.txt (4.5 KB)
Took off in Q Loiter mode, reached height of 22m and changed mode to auto. Set mission altitude was 150m. It gained altitude only 50m. The quad motors did not shut off and the air vehicle could not increase height and went to crash in an obstruction.
2023-10-03 14-57-37.tlog (636.6 KB)
1 Like
I can observe a sudden spike in the altitude and AccZ at a point. According to the log, the plane gained about 40m in less than a second, which seems impossible.
Hope someone helps to figure out the exact cause of the crash.
Your aircraft climbed to 20 meters in QLoiter mode and the Takeoff command was executed. According to this document,if a Takeoff command is executed when already flying, the vehicle will enter VTOL mode and climb the amount given in the altitude parameter, above its current altitude, and since the climb altitude specified by the Takeoff command was 30m, the aircraft climbed to around 50m, which is correct behaviour. If the subsequent missions were executed correctly, the aircraft should have climbed to 150 meters in the process of flying to the next waypoint after entering Plane mode…
The problem occurred after entering Plane mode. The aircraft pitched down even though the ATT.DesPitch indicated pitch up. I suspect that the pitching servo worked in reverse.
Was this a maiden flight? Have you checked the servo reversal on the ground according to this page? Even if the elevator surface is working correctly in Manual mode, it could be moving in reverse in Automatic mode.
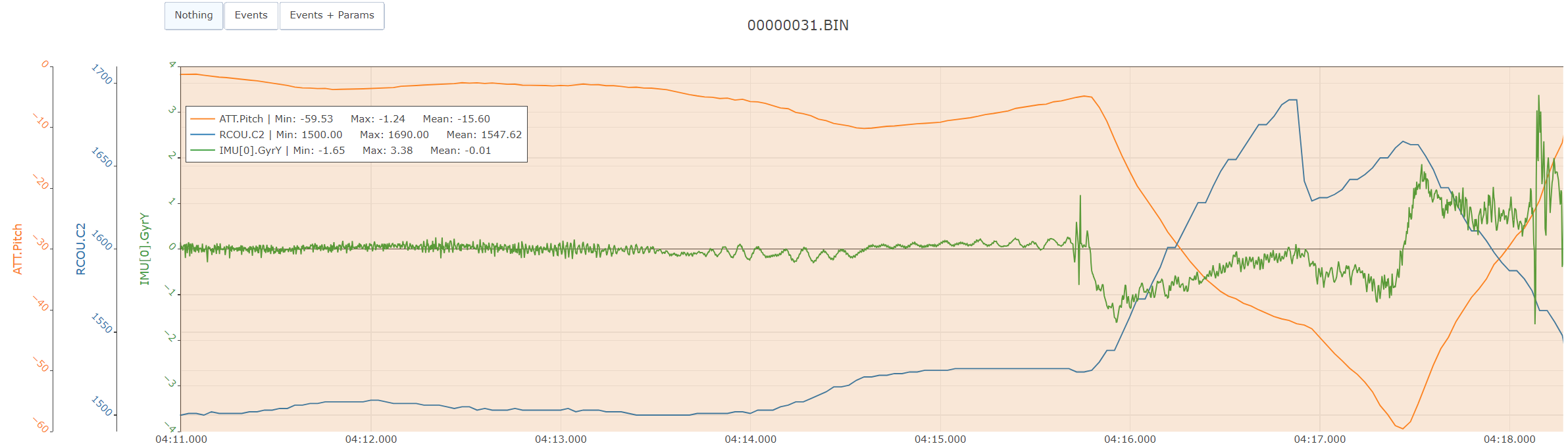
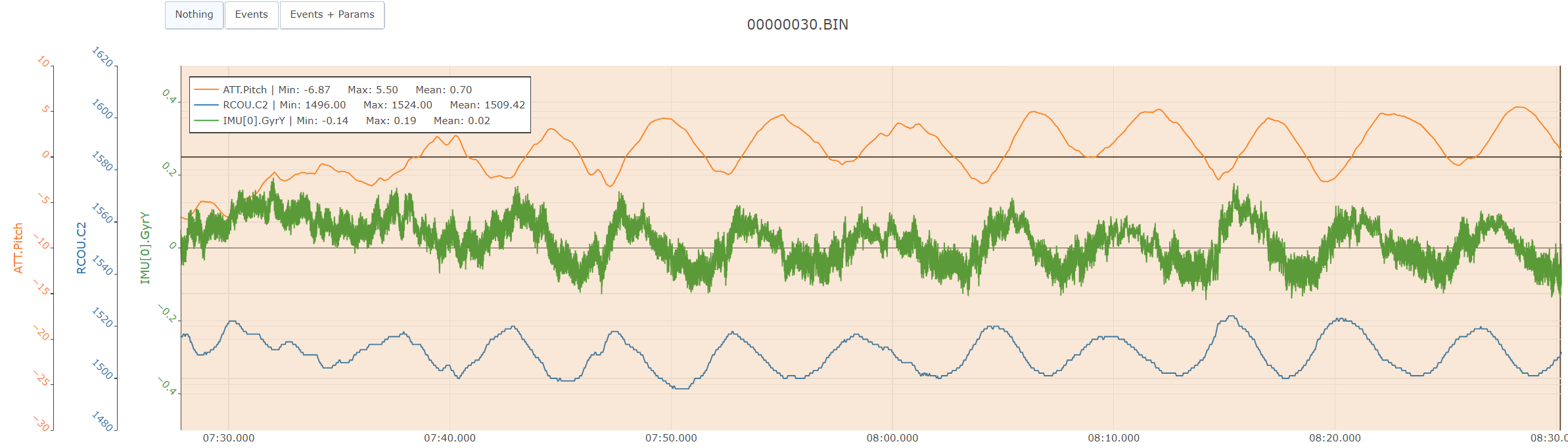
The previous flight log shows that a positive output to the pitching servo (RCOU.C2 > 1510) induces a positive pitch rotation (IMU[0].GyrY > 0), but the crash log shows that the aircraft’s response is the opposite of the previous log.
It can also be taken that the aircraft suddenly started a negative pitch rotation and the flight controller tried to rotate the aircraft in a positive direction.
There may have been some problem with the airframe or the pitching servo.
Previous flight log
Crash log