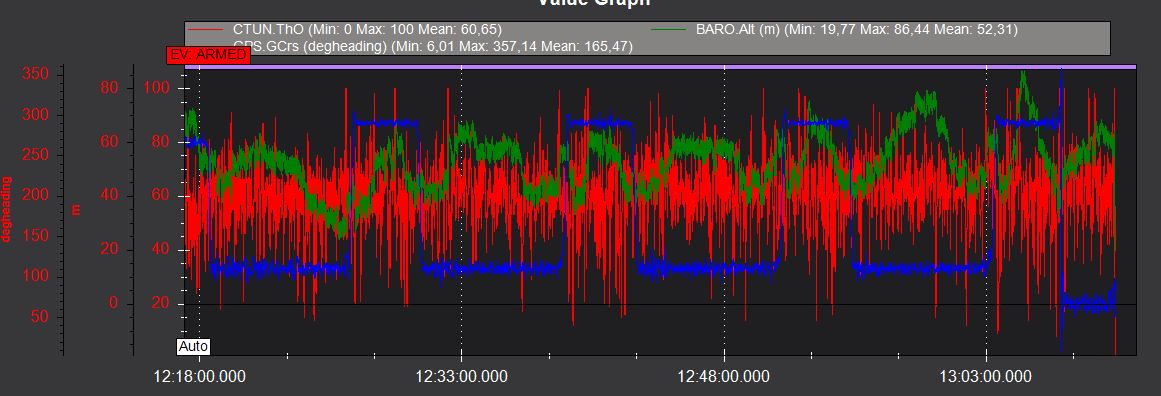
We had a bit of a crash on a windy day with our VTOL plane. We analyzed the log and figured it was due to a wind gust that threw the plane almost completely inverted (140 degree roll) and the plane didn’t have time to recover from that. Altitude from the ground was about 45 meters. It’s a VTOL plane with a wingspan of 217cm and has a forward facing engine and four copter engines.
I was wondering if someone could take a look at the log to see if the plane handled the situation the way it should have? The quad assistance angle () is set at 50 degrees The problem starts at 4340 seconds and at 4344 seconds the plane hits the ground.
I hope the damage is not too great. In my opinion, you have not sufficiently tuned the PID values for Roll. For an airplane with 2.16 wingspan, the deviations between roll and commanded roll are too large, even under the assumption of a gusty wind.
I would run again and long enough autotune around the roll axis in calm weather conditiobs. To give Q_ASSIST a chance, better set Q_ASSIST_DELAY to 0.
Also, the aircraft holds altitude very poorly. Have you adjusted the TECS parameters ?
You are using ArduPlane V4.1.0dev (937d7bf3). Which flightcontroller do you have ? As far as i can see from the log, you have 3 IMUs, but I can’t find their log values recorded.
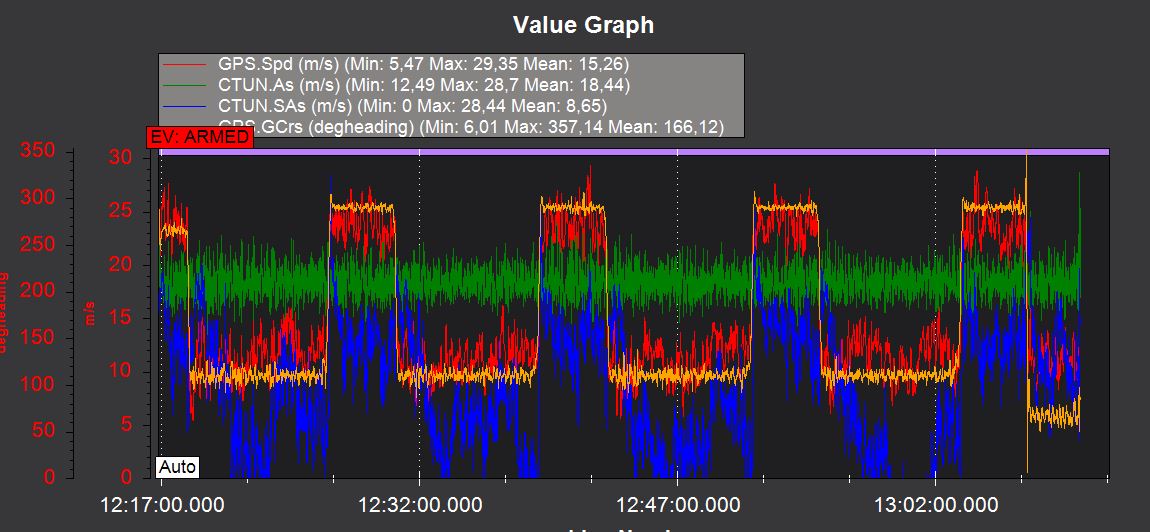
I also notice that the synthetic airspeed calculates catastrophically wrong values with EKF3. Fortunately, you have a real airspeed sensor. But that certainly has nothing to do with the crash.
I notice this because a friend of mine on a local forum had the same airspeed misjudgment happened with 4.1 dev and EKF 3, which led to some crashes without airspeedsensor.
We are using factory default PIDs, so I must agree that autotune is in order It does behave quite well but a bit slowly.
We are flying missions that keep a somewhat constant altitude from the ground. I think that explains the altitude fluctuations. The missions are generated by our own software and Mission Planner just loads them to the autopilot.
Flight controller is CubeOrange as VRquaeler said. I will definitely look into the synthetic airspeed issue!

 It does behave quite well but a bit slowly.
It does behave quite well but a bit slowly.