Hi All
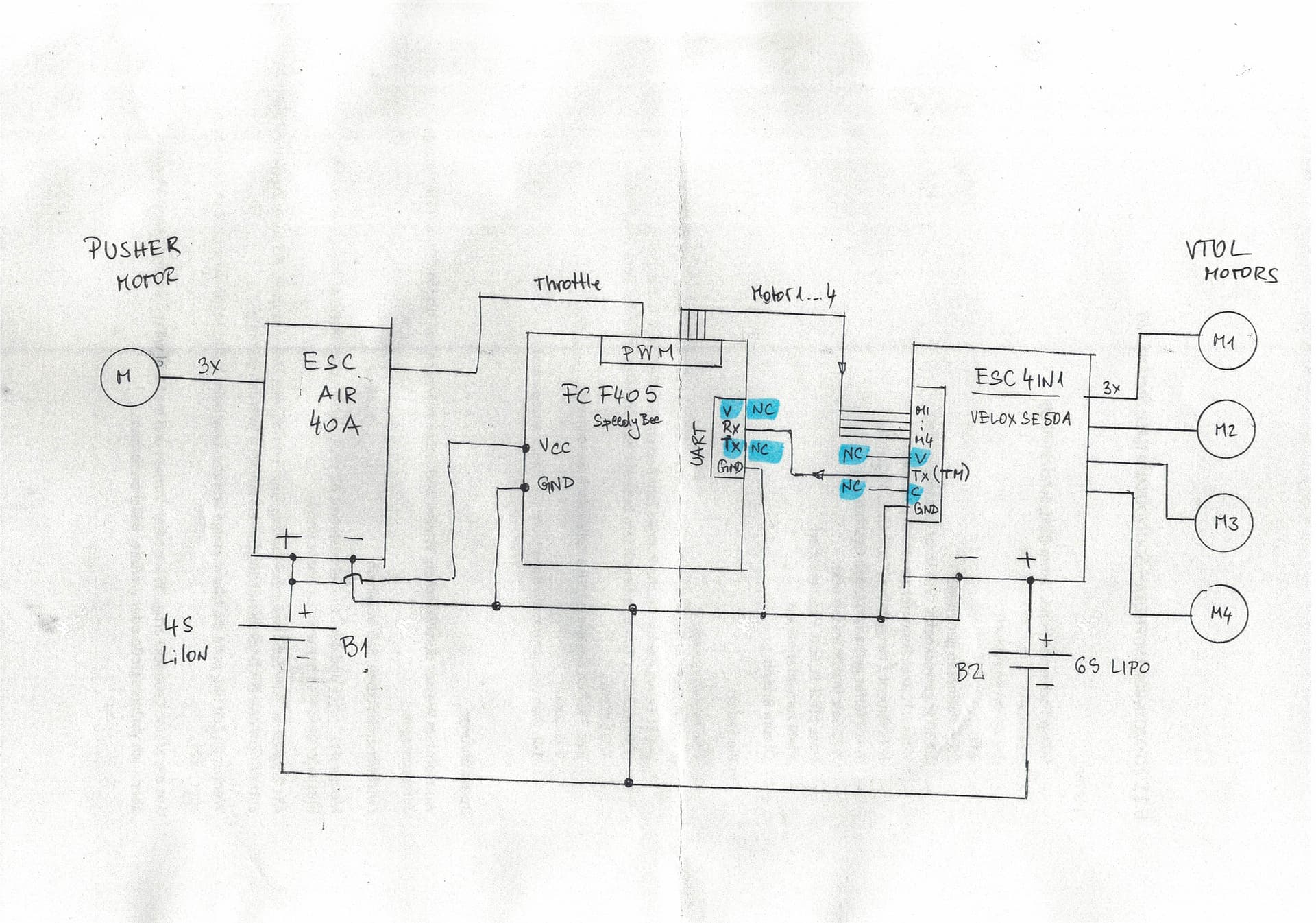
I am right now wiring my printed Cobra VTOL in dual battery setup. Meaning: one LIPO battery (3.3 Ah) for the hover motors and another LiIon battery (4S4P 14Ah) for the forward pusher motor.
My setup is:
FC: Speedybee F405 Wing,
ESC Hover: TMotor Velox V50A SE 4IN1 (BLHELI 32)
ESC Pusher: TMotor AIR 40A
Hover Motors: 4x Velox V3115 KV 640
Pusher: TMotor MN4010 KV 580
I want to monitor both batteries, voltage and current, in the OSD separately. Bat1 is clear, we get it from FC as usual. For Bat2 I am planning to use the Telemetry port which is available in the ESC. For this it shall be connected to the UART Rx Port. Which telemetry protocoll can be used here ? And can I use than this data (Voltage2, Ampere2 and used capacity2) in the OSD ?
The Voltage connectors of the ports I leave not connected because ESC 4in1 and FC are in different potentials.
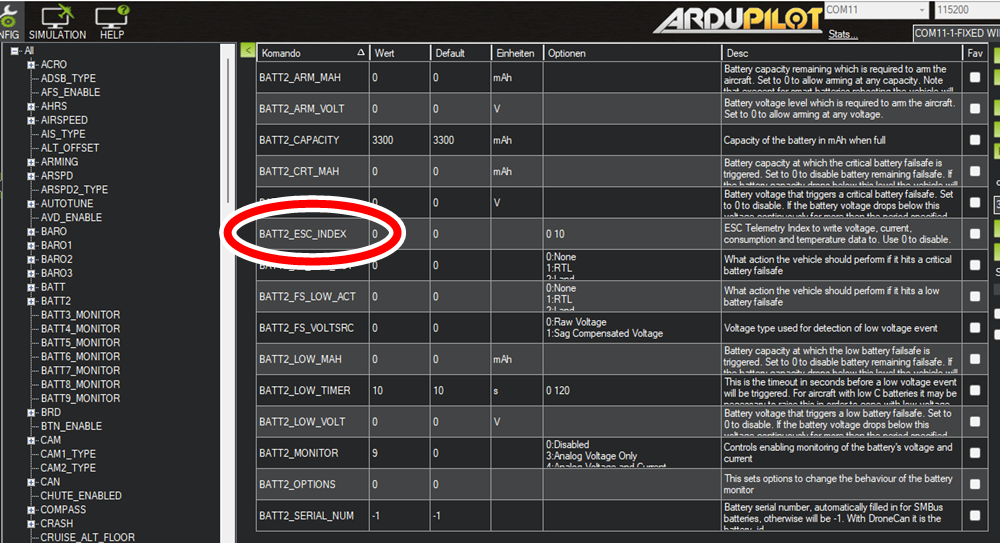
I have also been unable to find BATTx_ESC_INDEX with a Mateksys H743 slim, and cannot find the parameter even with the ESC parameters set and the telemetry port parameterized or with BDSHOT firmware.
In the sim I was only able to find BATTx_ESC_INDEX when I went to the beta, but not in stable. I also noticed in sim I couldn’t find the SERVO_BLH_x params. So something strange is going on there.
Yeah, obviously used quite seldomly. But on the other side lot of people are using the dual battery approach for their 4+1 VTOLS. Wondering how they do observe their 2nd batteries
I myself monitor three batteries in a VTOL via CAN-BUS with L-431 and two battery monitors directly on the flight controller.
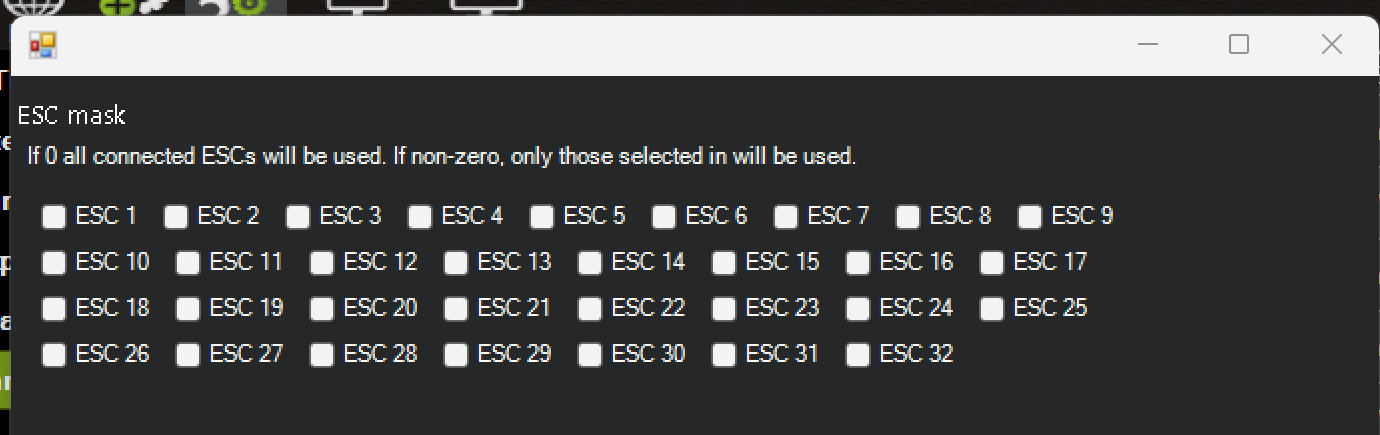
But you are right, BATT_ESC_INDEX is not in the current stable firmware. It is possible that all ESCs are evaluated. BATT_ESC_MASK is only available in the beta.
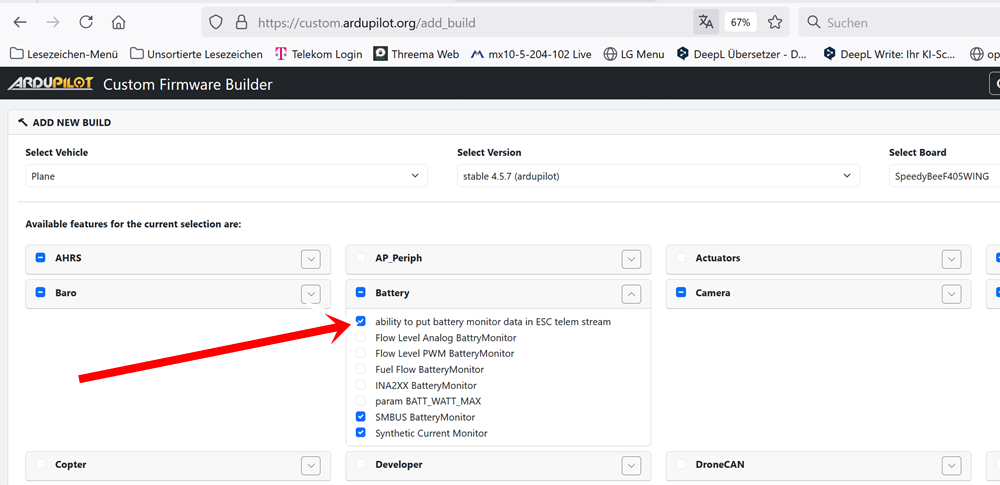
A clear advantage for those who can read. Sorry, I had completely overlooked that BATT_ESC_INDEX feature is usually only available as a build option using the Custom Firmware Build Server
Exactly, this I saw also few days ago, but could not find it again.
Anyway.
In the meantime a BAT2 line appeared in the MP OSD, which is actually that what I wanted.
It reports the bat2 Voltage correctly, but no Ampere information. While the VTOL motors are idl
ing I can obsrve the slight voltage drop, which is normal, but current is at 0 amp constantly
I have a rather unorthodox solution, I am finishing a 3m/9 kg standard style Quad Vtol plane, and I decided to use just two FCs, one for hovering, and the other for forward flight. There are very few issues for the transition for this style to use the Q_modes, I believe. So I am not going to use any Q style parameters, just plain copter setup for hover and plain plane setup for forward flight. Only issues is to sequence Flight Modes between the two FC correctly. And I simply switch the video feed using a video switcher, i.e. when in hover mode I see the copter FC OSD, and in the plane mode, the other FC OSD.
The advantage for the display is that in the hover mode you have display for the current/voltage of hover battery, and in the plane mode you have display of the long range battery (although in my case the battery is one and the same).
The other option is to use Matek 743 which has two current two voltage inputs. And I think that any board which has extra ADC channels can repurpose these inputs using some LUA script. For the second battery, you have to get a current sensor, you connect the output from that sensor to one free ADC (maybe RSSI ADC input) the other input would be for voltage (using some voltage divider, obviously) to some other free ADC (maybe ADC Airspeed), then you would read these values as sent by FC, recode them in LUA script to current and voltage and display them by means of OSD MESSAGE field. I have not tested this out, but it should work.