Watch around the 3:20 mark to see the plane wobble during landing. This can be caused by swirling wings or your own wake under the plane from the copter blades.
OK. I have seen a lot of people with problems that turn out to be stalls for whatever reason. Usually one wing stops flying before the other. Maybe at high AoA there is something due to the downwash others have suggested here.
Good luck. Let us know when you get it fixed  .
.
1 Like
we have made our custom design for the VTOLs so we know that this is not a condition of a stall. I will attach a video for your better understanding.
thank you for the reply.
1 Like
I have attached the video for your better understanding.
@cambull have a look at this video
@Eosbandi
https://drive.google.com/drive/folders/1BUpGRKtPJTE-Io5O2oq339IaBglPqM-t?usp=sharing
It only occurred for a short time so it is difficult to say for sure what caused it. It may be pitch PIDs or it may be wind or it may be wake or it may be the plane lowering the motor levels to descend.
If you see it happen more often, it will be easier to determine the cause. For example, does this happen in various wind conditions? Does it happen only during transition back to copter modes?
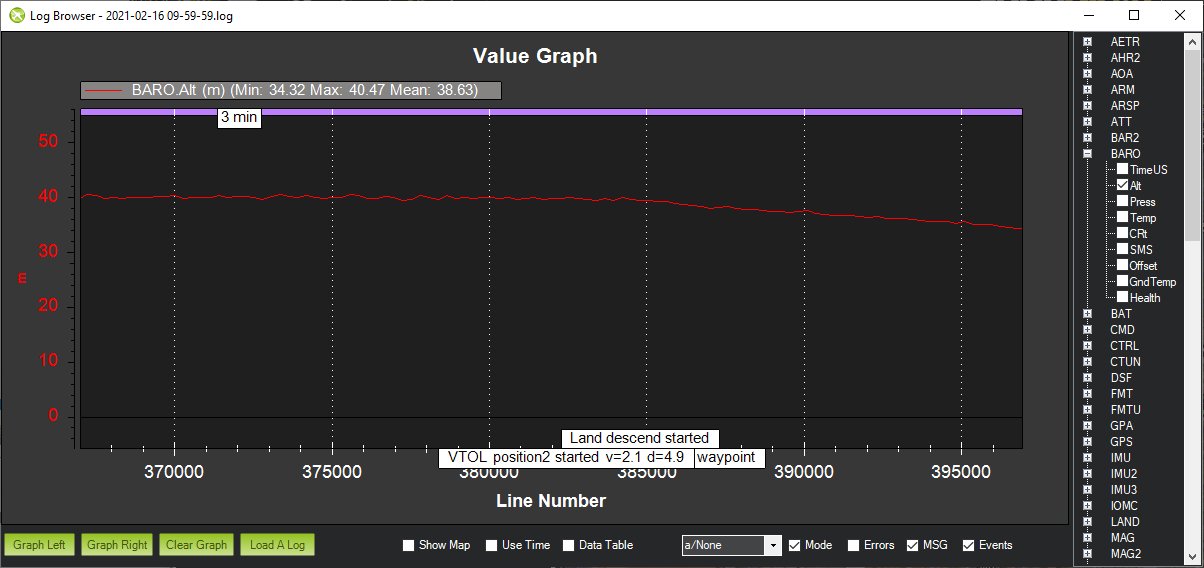
In the log, when the vehicle returns, the point just after the transition to VTOL has started a land descend. As Stewart suggested, the wobble may also be from a temporary stall as the plane slows.
thanks for your reply!
yeah, it happened only at the time of transition from fixed-wing to Quad mode.
I have also increased the D gain for the pitch axis of Quad mode but nothing changes.
Looking at the Log Viewer, your transition is right where the green “1.84” label is for GPS Speed. You are already going quite slow and you can see the knee drops to zero shortly afterward. I suspect that the transition is trying to stop at some waypoint destination which is why your plane tries to abruptly stop instead of gliding forward. The mission does not read in properly with my installation of Mission Planner v1.3.74 on Windows 10 so I cannot see all the commands. I suspect that you can fix this issue in your mission plan by using a different approach. For example, do your transition first and then use a LAND command. You can also try using QRTL when the plane is further out since it has a parameter for when to transition from plane to copter.
Good luck!

Is there any way in a mission to let the plane coast to a hover after transitioning back to VTOL mode? My impression is regular RTL just cuts hard into a QRTL mode once inside RTL radius, and if the OP has a pitch tune issue the plane will still exhibit the same problem once in QRTL. I know because I’ve never quite tuned out a pitch overshoot problem in VTOL mode, and the start of every QRTL is a violent pitch over maneuver towards home position. The controller simply tries to rapidly capture the preset QRTL speed using VTOL logic, and proceed to home at that speed, regardless of how much energy you’ve got at the point of mode switch. That’s why I always fly the transition manually in Qhover.
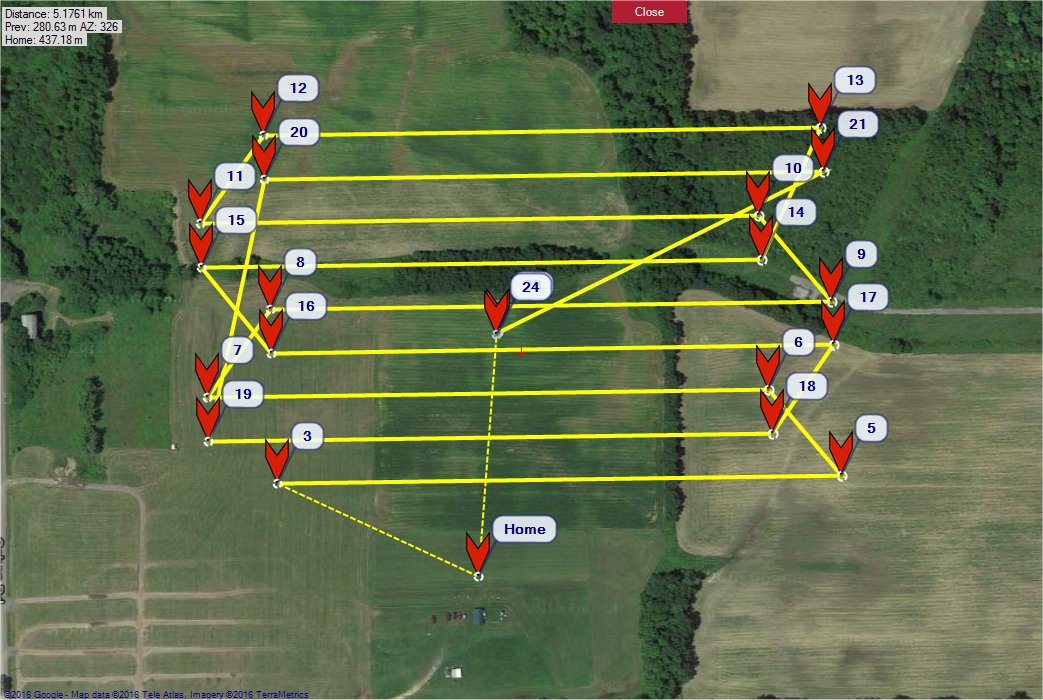
Years ago, my VTOL mapping missions looked like this below. Waypoints 23 and 24 allowed for descending loiter turns before heading home. The VTOL was flying towards home when it transitioned to copter mode.

still, once within rtl radius, the plane would transition and try to capture WP speed as quickly as possible , even if it means braking in VTOL mode and waste the energy you have in fixed wing mode, right? i’m going to do some more complete tests about this behavior, but i suspect there is no way to set up an efficient coasting transition to land in an auto mission.
1 Like
Try reducing THR_MAX so there is less effort to attain the Q_WP_SPEED.
1 Like
I will try that in my next testing
@akhil I had a look at your log ‘2021-02-16 09-59-59.bin’ and found a few things:
- it hasn’t gone through the basic setup process for tuning a quadplane. See Tuning Process Instructions — Plane documentation - for example battery range not setup for voltage compensation.
- the motor expo is set very low (0.25). Do you have thrust stand data that supports such a low value?
- it is a very old firmware (4.0.1). That firmware doesn’t have the changes to link the rate controller demand between elevator and VTOL motors. I notice there is a phase difference between the two:

that phase difference comes from the different time constants. This makes will make the issue worse.
I’d recommend you do the following:
- start by moving to the 4.1.x firmware (4.1.2 will be released this week).
- then go through the harmonic notch setup to reduce you gyro noise: Managing Gyro Noise with the Static Notch and Dynamic Harmonic Notch Filters — Plane documentation
- after you have the harmonic notch in place, increase INS_GYRO_FILTER to 30
- then do a fixed wing AUTOTUNE
- after that you will be able to tune the VTOL a lot better, as the harmonic notch will greatly reduce gyro noise
The above is quite likely to greatly reduce the issue. If not then please post a log and we’ll have another look.
Cheers, Tridge
1 Like
Tridge,
I’m having the same issue, sharp pitch up followed by pitch oscillations during auto mission detransitions. Manual detransitions are smooth with no issues.
On a separate note, there is also a small pitch oscillation while in fixed wing auto mode. This happens even after the fixed wing autotune, any advice on smoothing that out?
Attached is the log, any help would be great. Aircraft if a quad, with tractor motor in nose. Thanks
https://drive.google.com/drive/u/0/folders/1agyk8qSBNU6V9yt6wlNzOtfADsKLX3NP
logs are not accessible. I’ve sent an access request, but best to make it public
Oh, thanks. I made it public.
Yes, Tridge fixed the main issue in 4.1.3 I think. That plus a bunch of quad-tuning smoothed it out. Flies great now. Changing transition deceleration to 1.3 helped too.
1 Like
Did some more testing and yes Q_TRANS_DECEL makes a significant difference, as it was designed to. Changes the vtol pos1 distance quite a lot.