Hi,
I’m having problems trying to make a VTOL (Foxtech Loong, Cube Orange, latest 4.1.4 arduplane version) system navigate as desired when in the multirotor mode. The basic required operation setup is to take-off in VTOL, fly in fixed-wing to a certain point, transition to multi to descent to a certain altitude and take a measure, and then come back to fixed-wing. The planned flight looks like this:
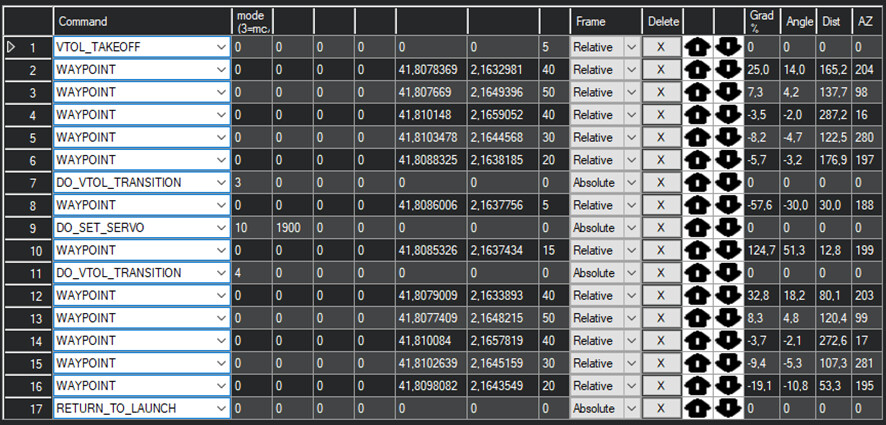
Everything goes ok except that once the waypoint 7 transition is fulfilled, it quickly skips the following waypoints transitioning again to fixed-wing (waypoint 4), without performing the altitude change… Most strange thing is that with another VTOL system with an older firmware version the flight plan works as expected, and I’ve been comparing both set-ups and look quite the same…
Any clues on what is going on?
I attach the parameters to see if some clue can be found there… Loong-Cube-V1.0.param (20.9 KB)
Thanks in advance!