We have a problem with VTOL in the landing transition. In QHover autopilot mode
falls out of the EKF and transit into the DCM, after which the autopilot loses altitude orientation and practically does not
controlled by throttle stick.
Conditions under which the situation occurs: no GPS, (RC 65 or RC90 with allocation
laneswith in 1 lane with GPS, 2 and 3 Lanes without GPS)
Switching from Cruise to Qhover
The problem is this: upon transition under these conditions, the EKF stops working
and autopilot go to DCM no altitude control.
Solutions: Identify and fix EKF stall, in DCM fix height data loss.
This problem is easily repeated on the simulator.
Also, if EK3_Affinity is not defined and AHRS_GPS_USE is 1, then any transition to Q mode from Fixed wing
without GPS leads to crash. In theory, it should have gone to Qhover.
Please take to work. This is an extremely serious problem for Vtol.
if your T/W is less than 2, it might be a quick and easy diagnostic test to build ardupilot with the above linked PR and run your sim test with it. but im not confident that is the core issue here.
Our T/W is ok.
Q_M_THST_HOVER 0.6875
On takeoff, we have absolutely enough power.
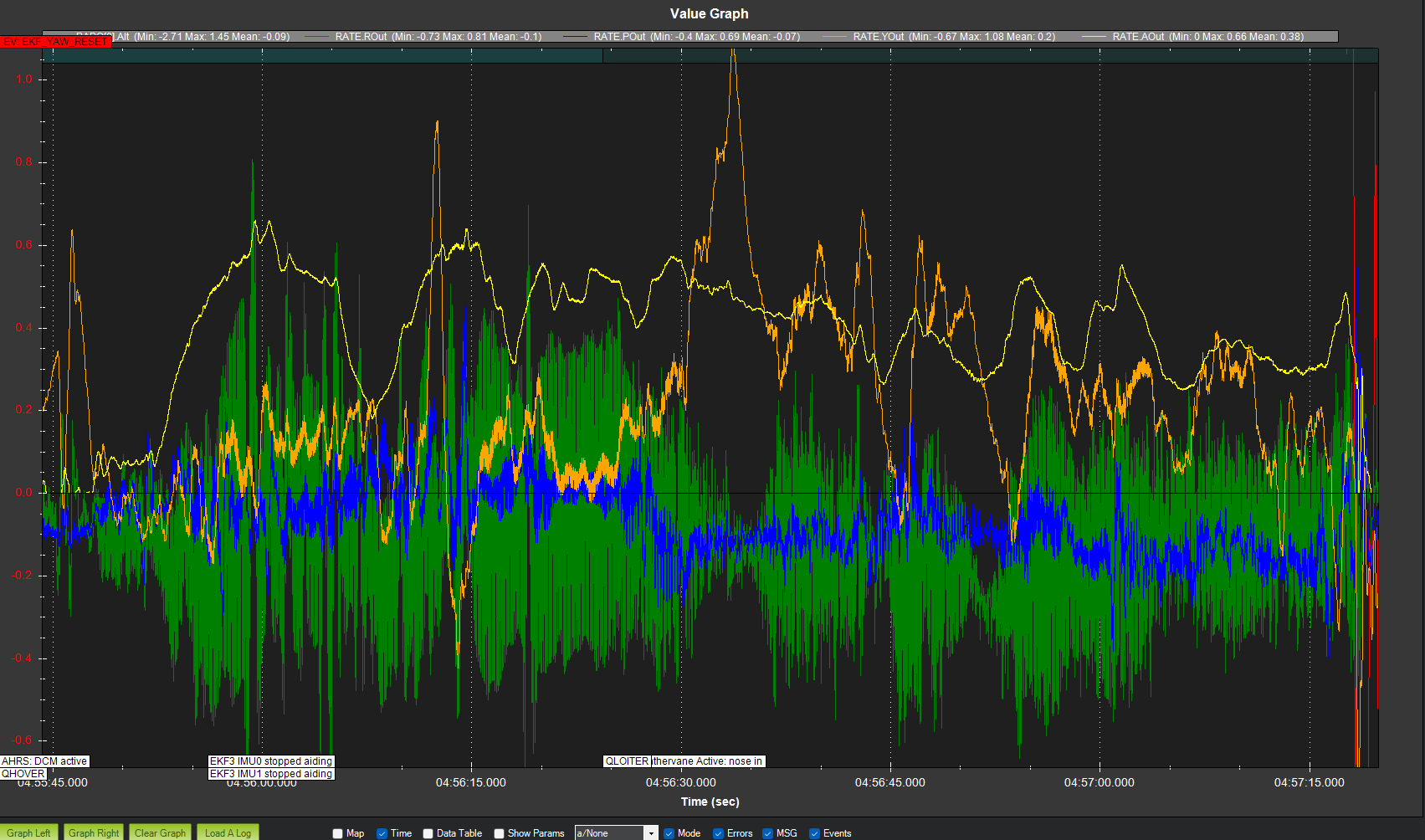
With PID by Roll, the situation really needs attention, but it is not critical when GPS is on.
no problem on hovering
note that you can fly with T/W < 2 safely, you just have to modify the code, similar to what i linked above. i have deployed similar modifications (not exactly what i linked) and it works fine for me (no more mysterious sudden drops).
but your problem here appears to be that your vtol setup is not a great match for your plane. there could be multiple reasons why this is the case, such as tuning, too large moments of inertia, and underpower; more details are needed.
the problem occurs on any Vtol aircraft, even on a SITL simulator.
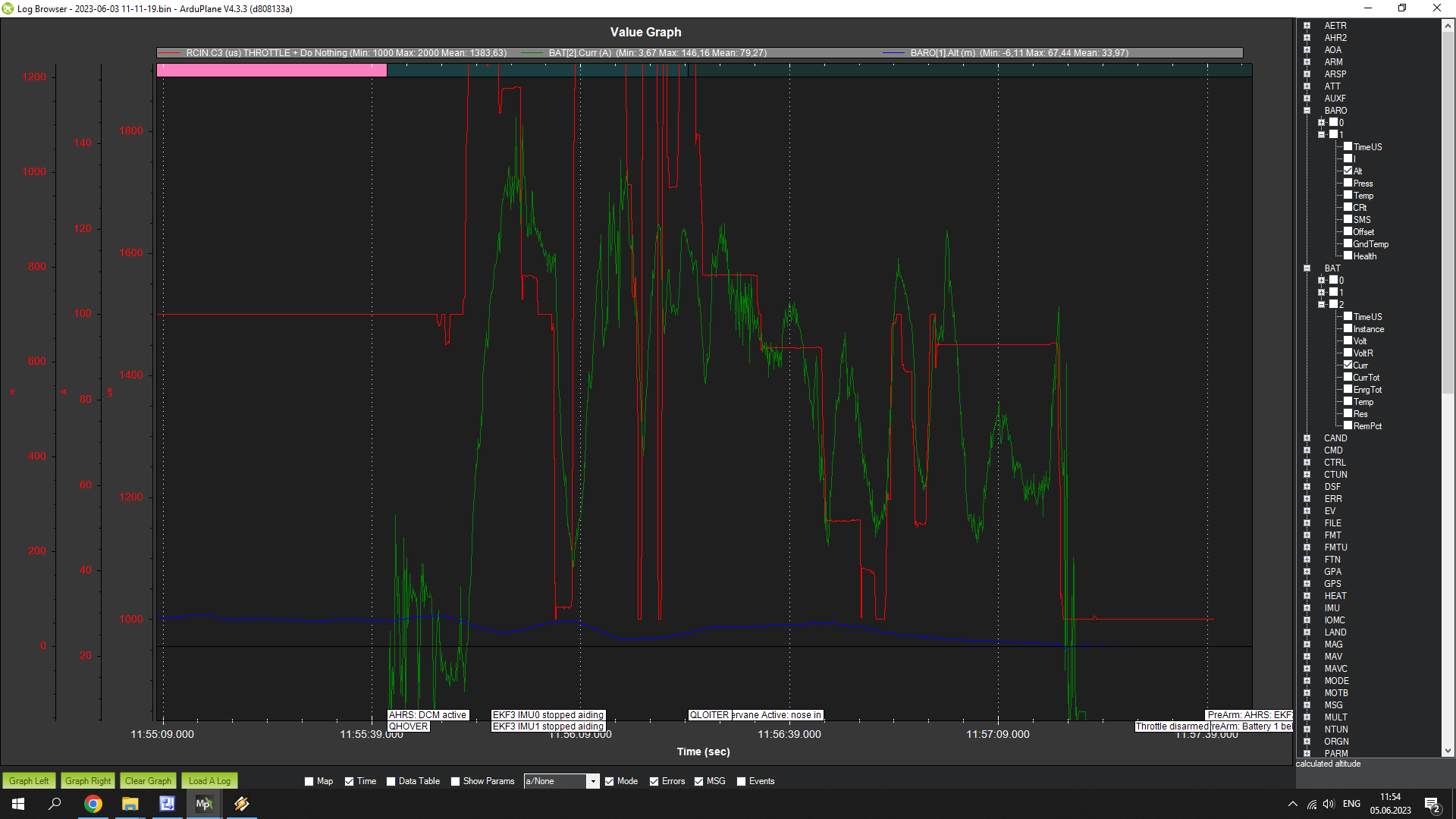
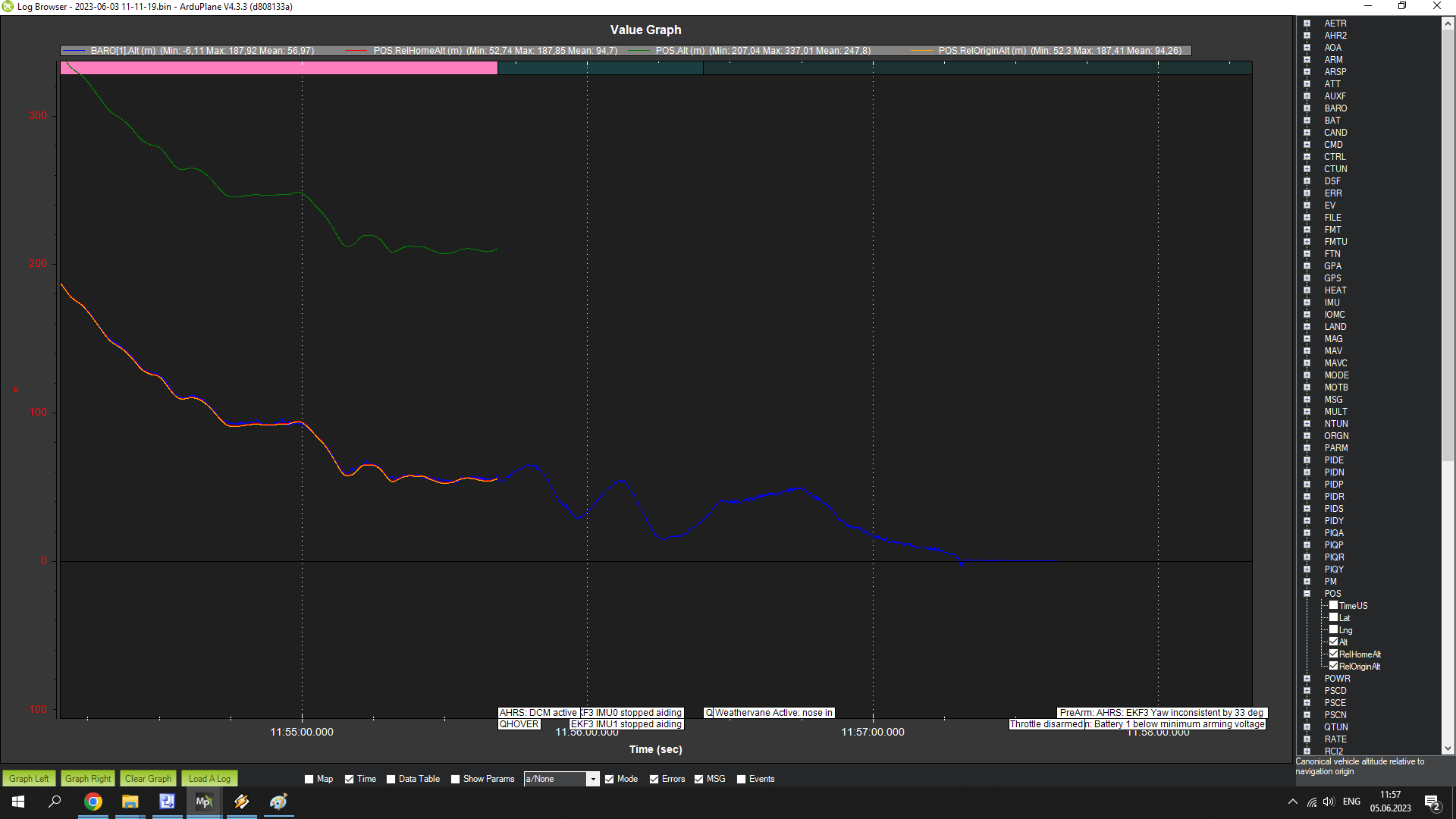
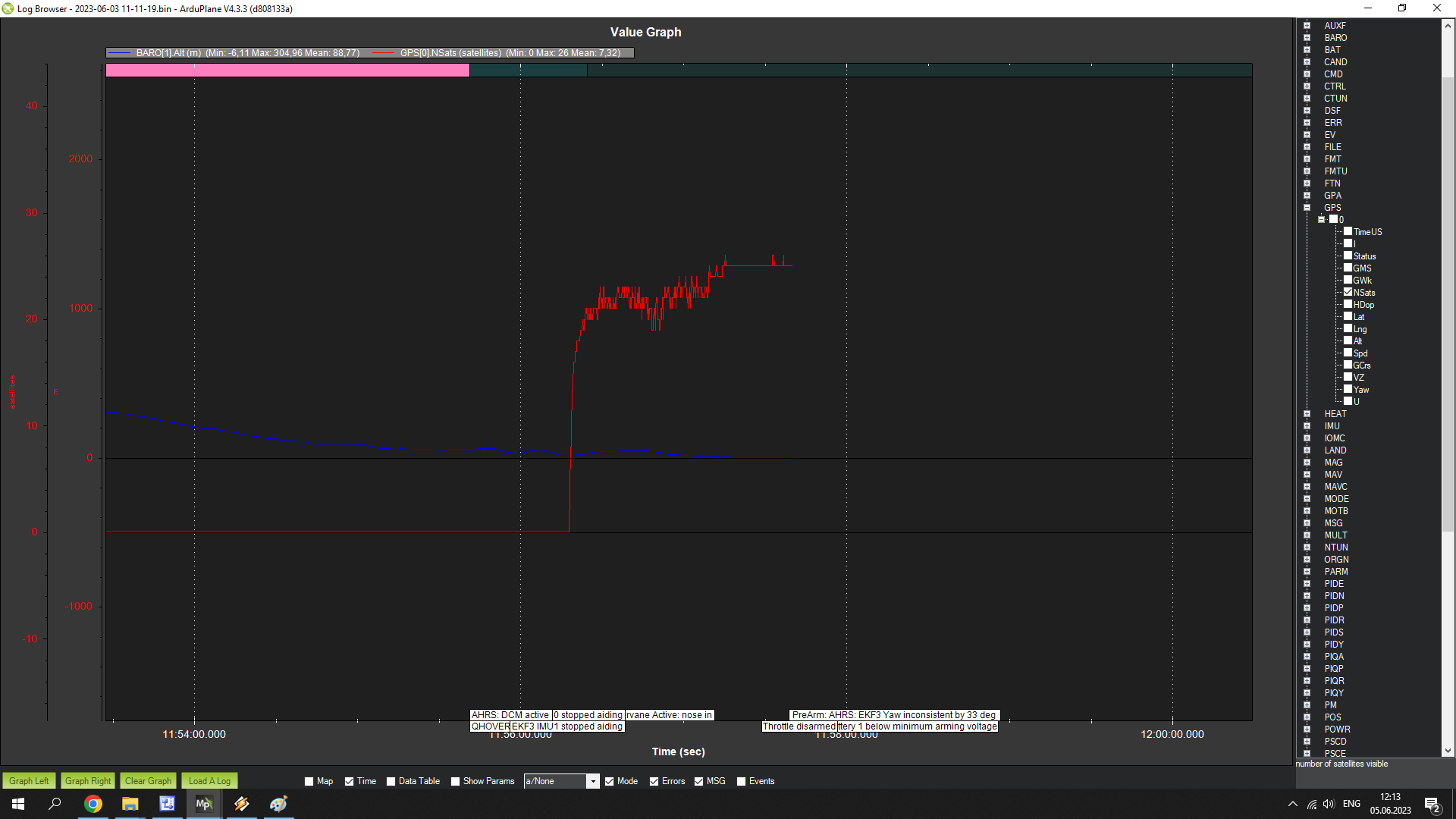
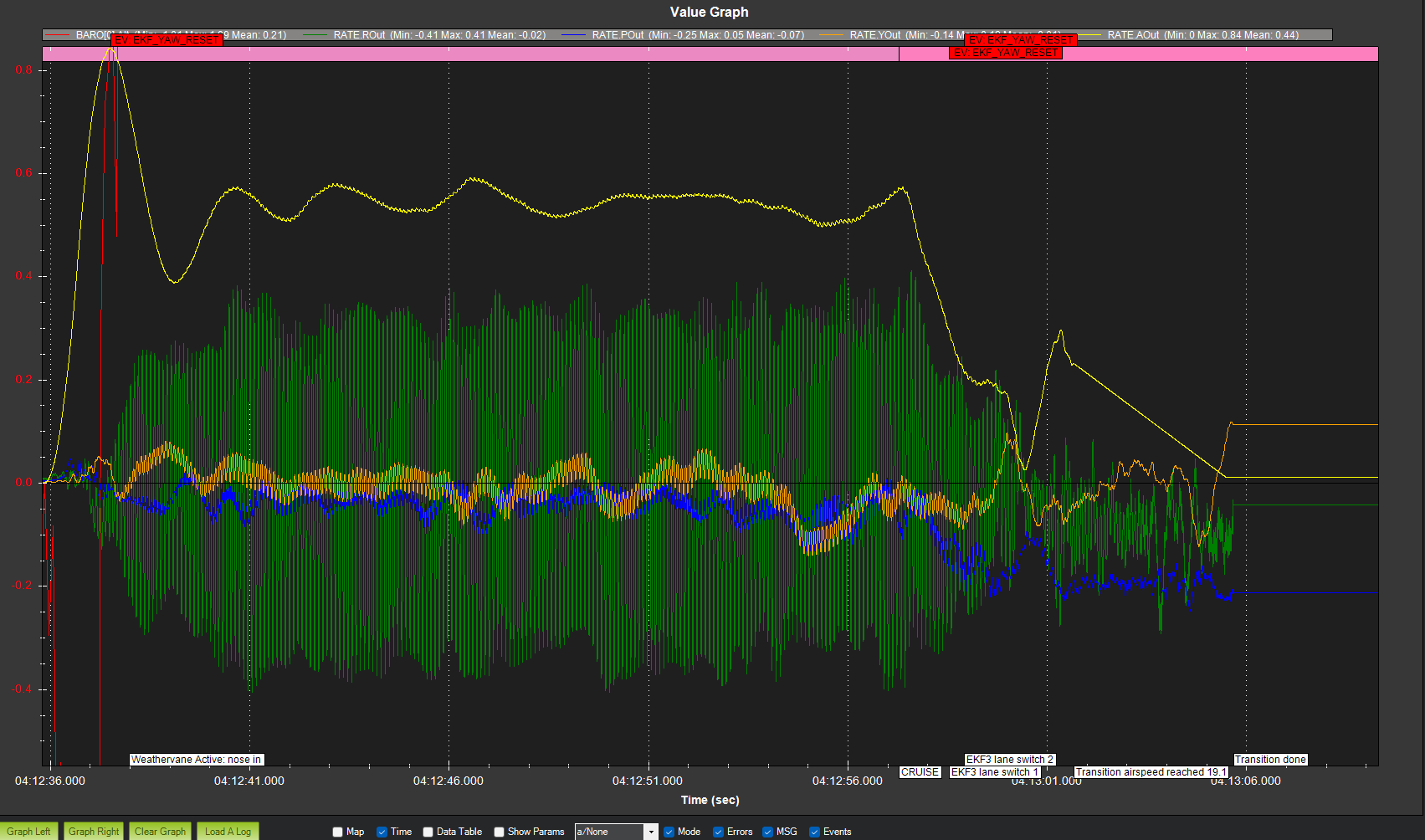
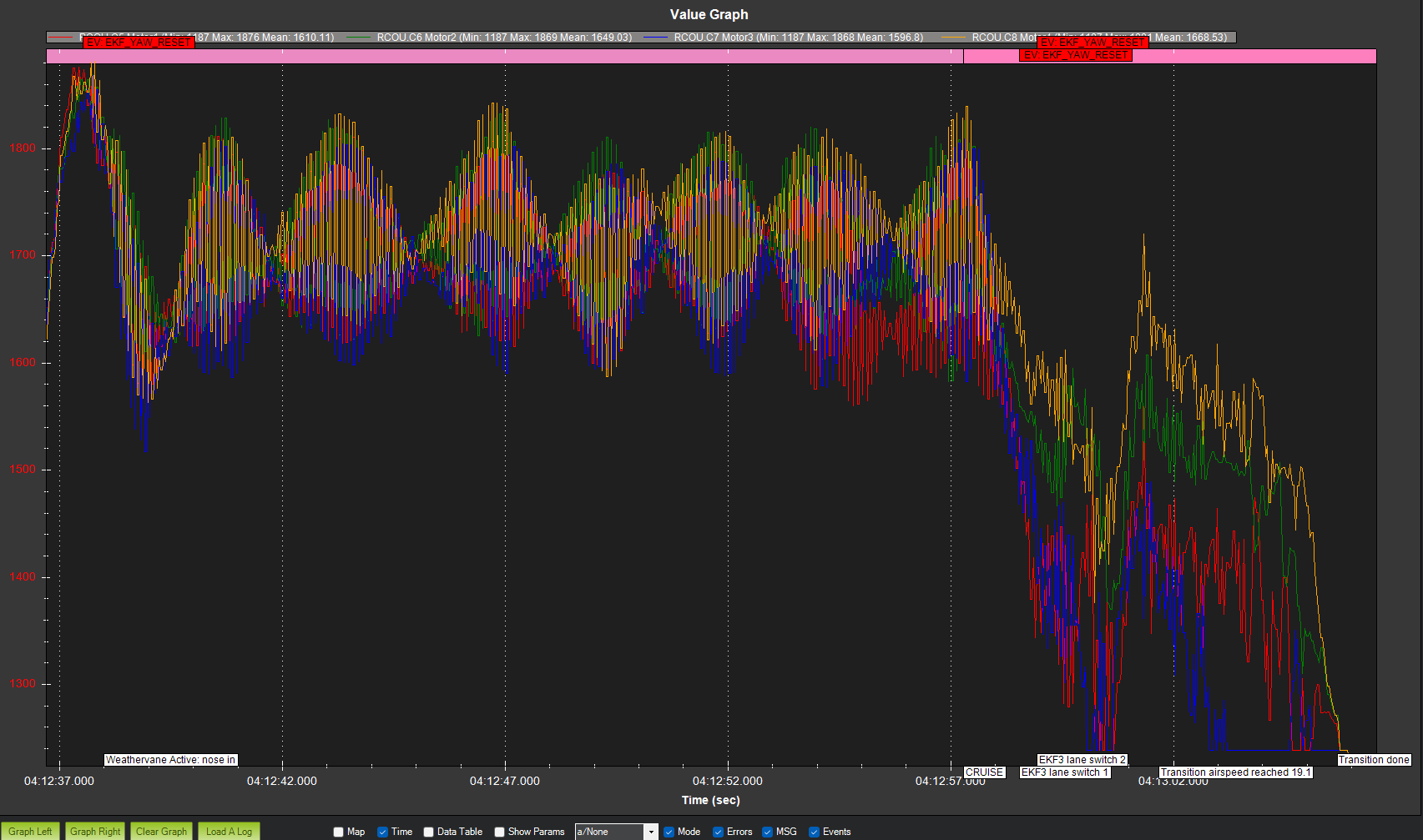
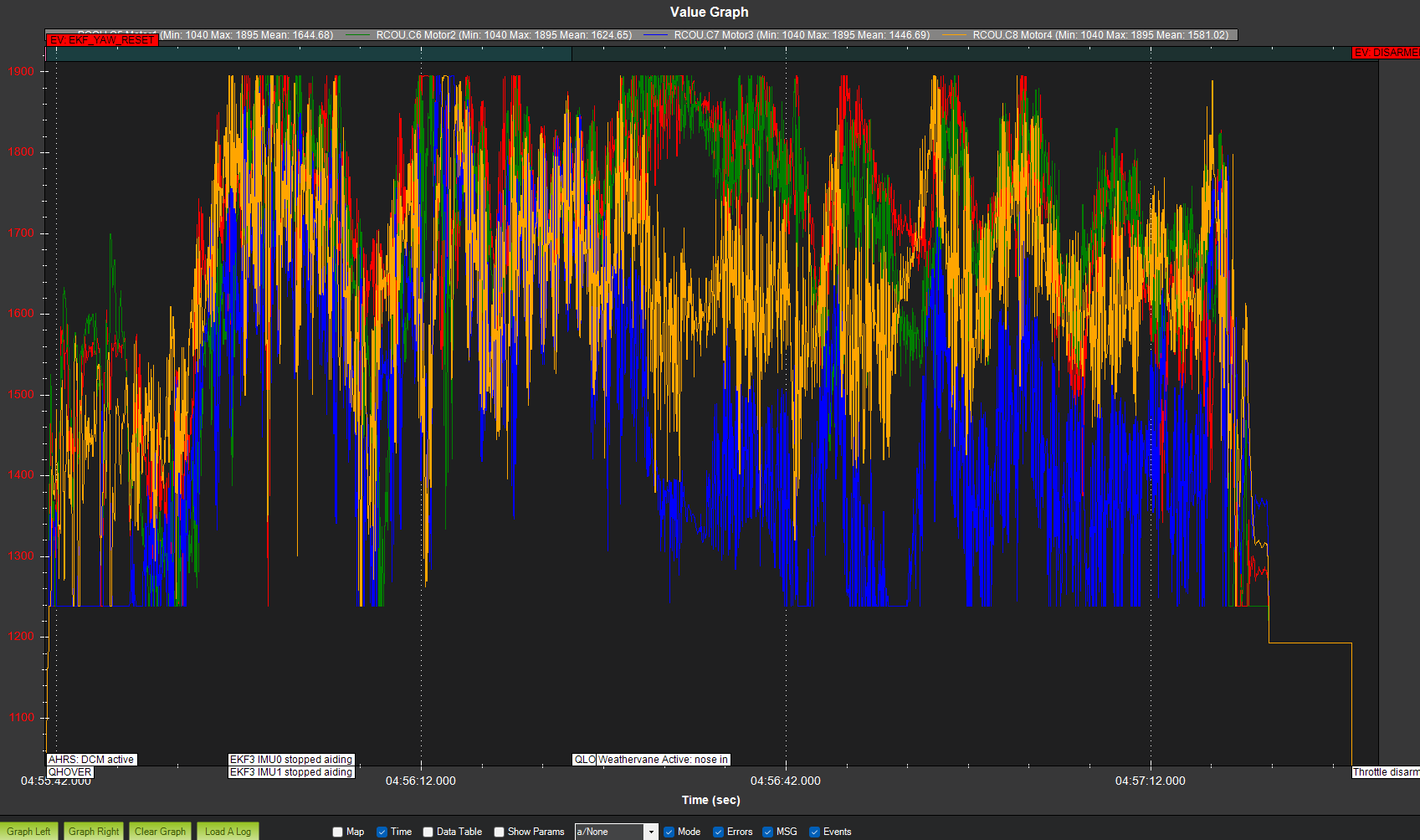
These logs are an example of what is happening.
don’t focus on PID. The plane with GPS flies perfectly. Everything starts in mode
DCM. It occurs when GPS is disabled.
oh i see. i missed your SITL remark. might be a bug with transition code that I am not familiar with.
but once you get that solved, your vtol certainly has issues. it may or may not have caused this crash, but it could very likely cause one in the future.
I faced the same trouble. Tried Quicktune lua script, it tuned the vtol nicely. Everything is functioning fine until the GNSS lost and when it comes to land without gps position. I have 12S with plenty of power onboard, have 4 pcs 22x11 props which can lift up the vtol “like a rocket”.
Please, explain for dummies - should I build a new one binary without hardcoded param " float throttle_thrust_best_rpy = MIN(0.5f, throttle_avg_max); " ?
I tyred to switch from EKF3 to EKF2, and still it crushes and switch to DCM Mode on the transition from CRUISE to QHOVER/QLOITER. On DCM mode alttitude is not holding by the baro data. Can anybody explain why?
Hardcoding the 0.5f param to match your aircraft’s T/W wouldnt hurt, especially with VTOL planes that are meant to use gentle maneuvers in VTOL mode. So far, its been great for me making this kind of modification.
BUT, it only makes a difference if your thrust-to-weight is less than 2.