Today wanted to do the first flight with this new build, but it didn’t get very far.
7kg VTOL Glider configured as XQuad
Cube + Herelink + Plane 4.0
After going through the pre-flight checks I lowered the spring-loaded throttle and armed the motors in QHover.
Then I slightly raised the throttle to about 10% from 0 to check motor response.
But the plane actually took off a couple of cm. Shouldn’t it start climbing when trottle stick gets past 50%?
I right away lowered the throttle again. (10% -> 0)
But the plane increases the output and flips to its left.
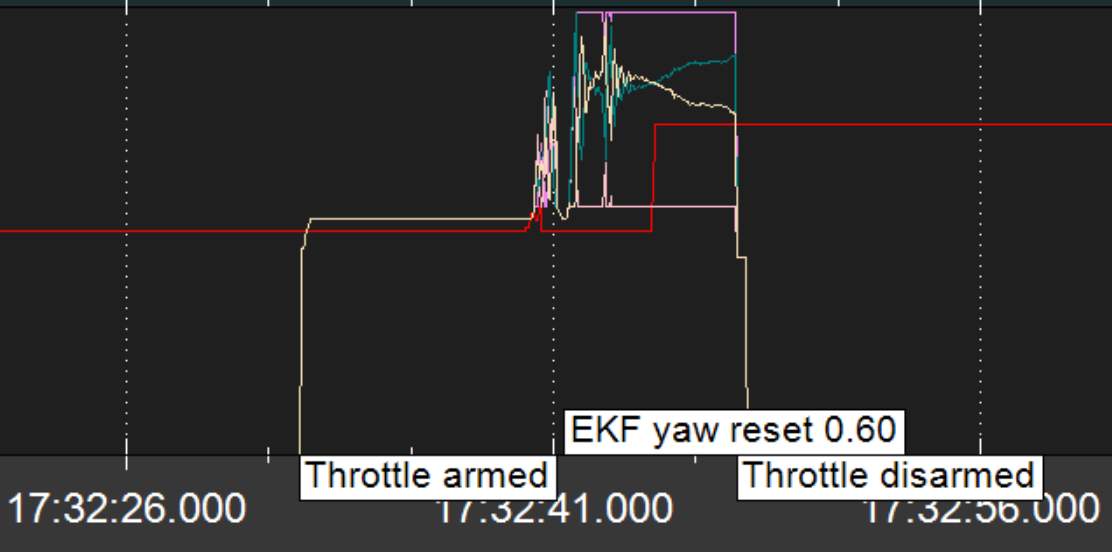
Looking at the log the plane actually reduced the outputs when I lowered the throttle, but right away there is an “EKF yaw reset 0.60” event. After that the plane goes crazy and flips without any input.
log: https://1drv.ms/u/s!AuKkq6JXpbFTzpQKo482b5KUsWjHXw?e=VaGDDH
Any suggestions what caused the EKF yaw reset? I double checked my motor connections and the FC is facing forward. The ground wasn’t very even. Could that have something to do with it?
Anything wrong with my throttle stick configuration/trim? Is it ok to take off in QHover that way?