continuing my analysis of the maiden Skywalker X8 flights (in general successful but lots of room for improvements):
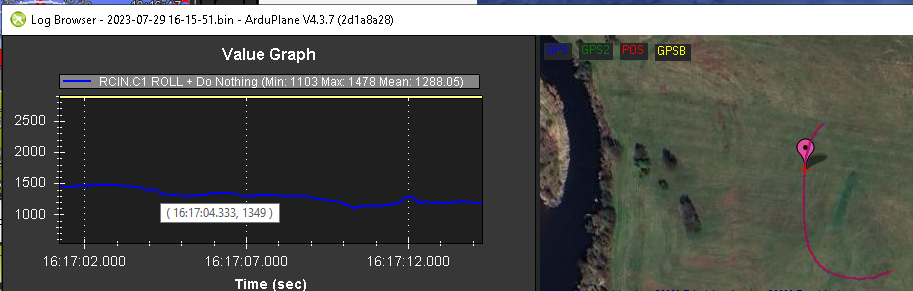
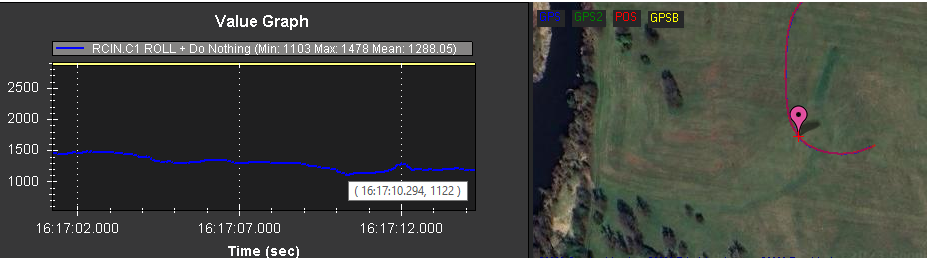
why the plane turns so lazily in the FBWA mode? I attach two screenshots, on the first one the RC roll value was 1349 (the left side of the message label) and it hardly starts to change the flight direction
Of course I’m not suggesting that something is wrong with the firmware, rather expect some advice how to tackle this problem. PID changes? More servo throw? Here the advice for Skywalker X8 is:
RLL2SRV_P: 0.8
PTCH2SRV_P : 0.5
NAVL1_PERIOD 19
But the first two parameter do not seem to be present in the 4.3 ArduPlane any more.
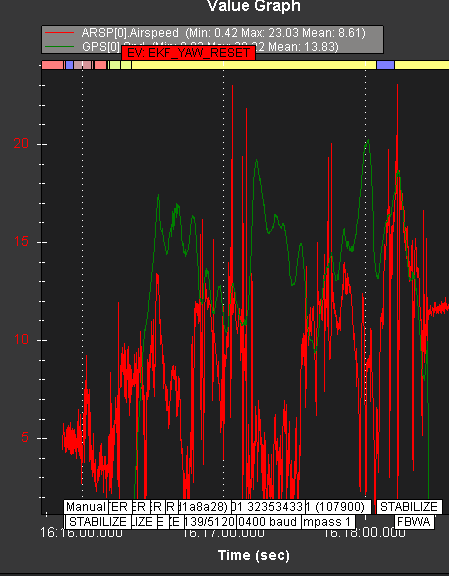
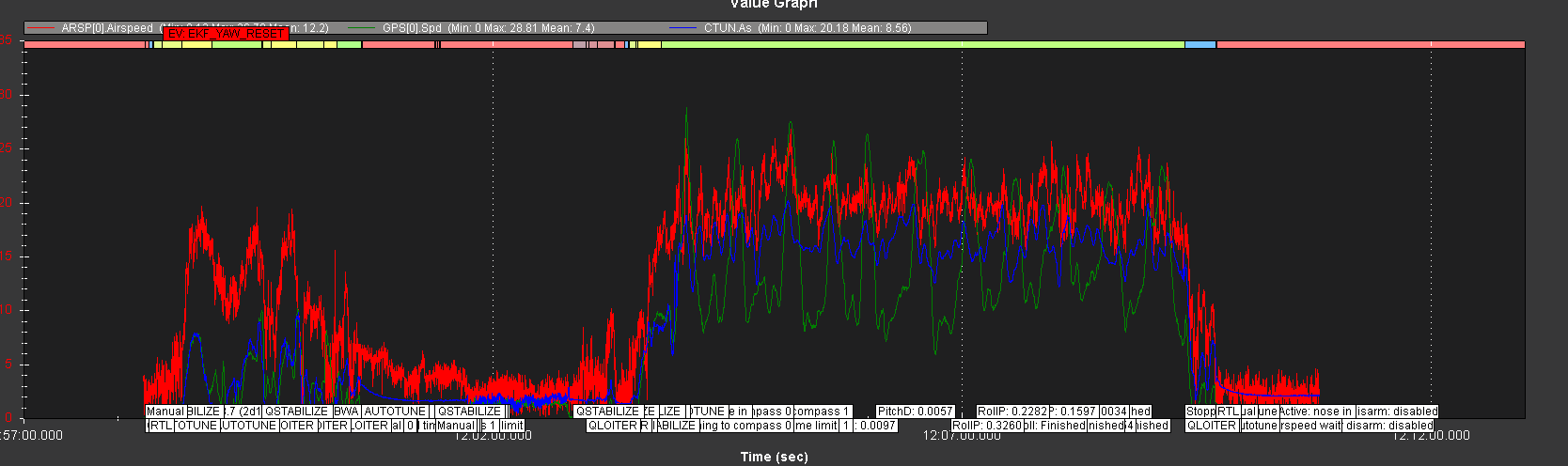
Another issue is that I’ve installed the Mateksys D4525 digital airspeed sensor (without using this data by the flight controller). The data seem to be very noisy and completely not in sync with the GPS speed:
I was just about to look at the logfile, but Google wants a Google Drive account.
Besides the logfile, it is interesting to see how you installed the airspeed sensor or the pitot tube. So a photo would also be helpful in addition to unlocking the Google drive.
many thanks for your answer. I’ve changed the read access for the log file to “anyone with the link” and tomorrow I’ll publish the photo of the sensor.
I post photos of how my airspeed sensor is mounted (a makeshift solution). However, I think I’ve found what’s wrong. I’ve found in my “Sensors” box two other Pitot tubes (about which I’ve completely forgotten) and they have the holes in the front opening throughout the tube (you can see the light from both ends). And in the Matek sensor this is not the case. The plastic tip is clogged and the obstacle is so hard that I think it’s a manufacturing problem. Should the hole be reaching through the tip? I think yes, it should be the dynamic pressure. Also putting the tip into water did not help, so it’s clearly not an insect, not soil, but simply not very precise molding. I’ll give a try to the larger sensor.
The sensor is mounted beyond the reach of the propwash from the vertical propellers.
I think you have found the cause for the strange airspeed measurement. Both lines (static and dynamic) must be well passable (Blow some air with your mouth through the tubes removed from the sensor).
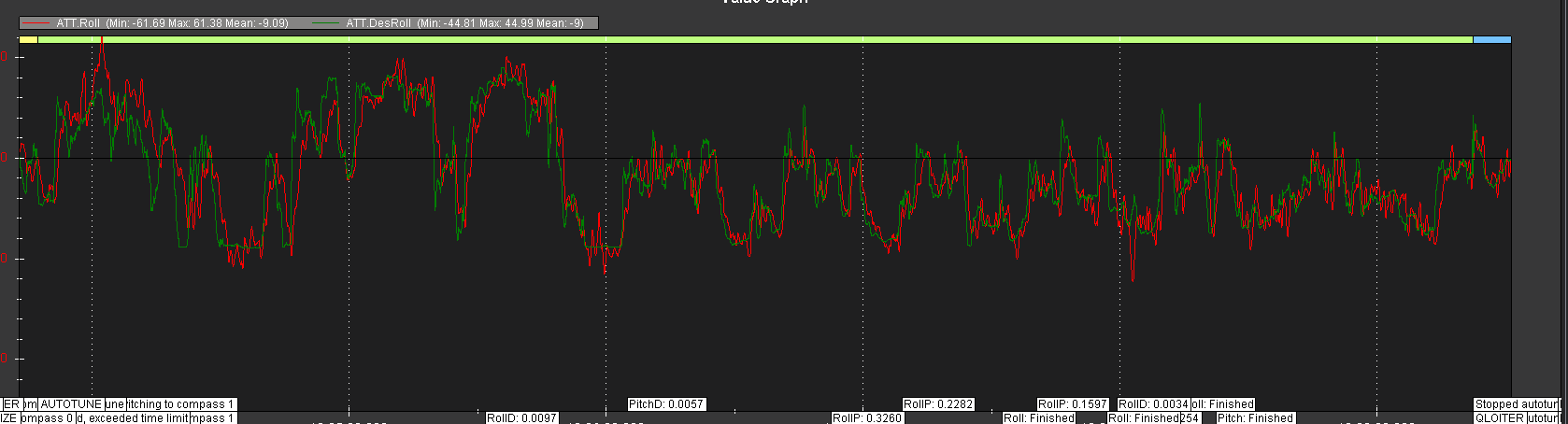
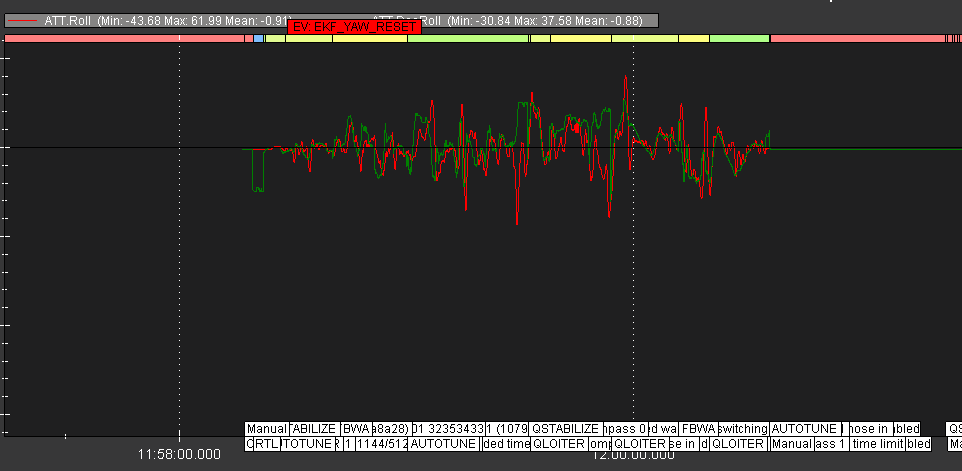
The stability when hovering in the QMODES is good. In fixed-wing operation, you must first perform a flight with autotune so that the control is better there. You can check the quality of the attitude control in the logfiles (*.bin) by displaying the values for roll, desired roll and pitch, desired pitch with Missionplanner (ATT.DesRoll ↔ ATT.Roll , ATT.DesPitch ↔ ATT.Pitch)
Thanks for your answer. Indeed, the VTOL part seems to be fine, I need more sensitive relation to the inputs in the plane flight. What are the first parameters to look at? Is the reaction to the controls too weak, or is there a delay (for example, too slow control loop)? What are the current counterparts of these parameters, which are mentioned in the official Arduplane’s Skywalker X8 docs?
I really like your hints, or rather “the Hint”. No doubts what to do. I’ve flown the aircraft even if the weather was quite rough, strong wind, gusts, a coming storm and a very turbulent ride. I’ve managed to run the autotune and indeed the control seemed to be easier in the end. Still analysing, but I hope that improvement can be seen.
The flight log
It can be seen that when autotune was done, the roll follows the desired roll much more closely (that was my feeling but I hope it can be seen in the logs?)
The PID values already look much better. But there is a lot to note. Therefore I recommend to go through the WIKI instructions for PLANE as well as for VTOLs.