My Q_ASSIST_SPEED varies from plane to plane but it is usually based on being below the stall speed. On some planes, it can create havoc if it come on prematurely in forward flight just because the plane slowed down. This also changes whether or not you use an air speed sensor. Without and AS sensor, the GPS speed (or ground speed) is not always a beneficial reading. In general, I set the Q_ASSIST_SPEED low enough to trip only when the plane is in real trouble.
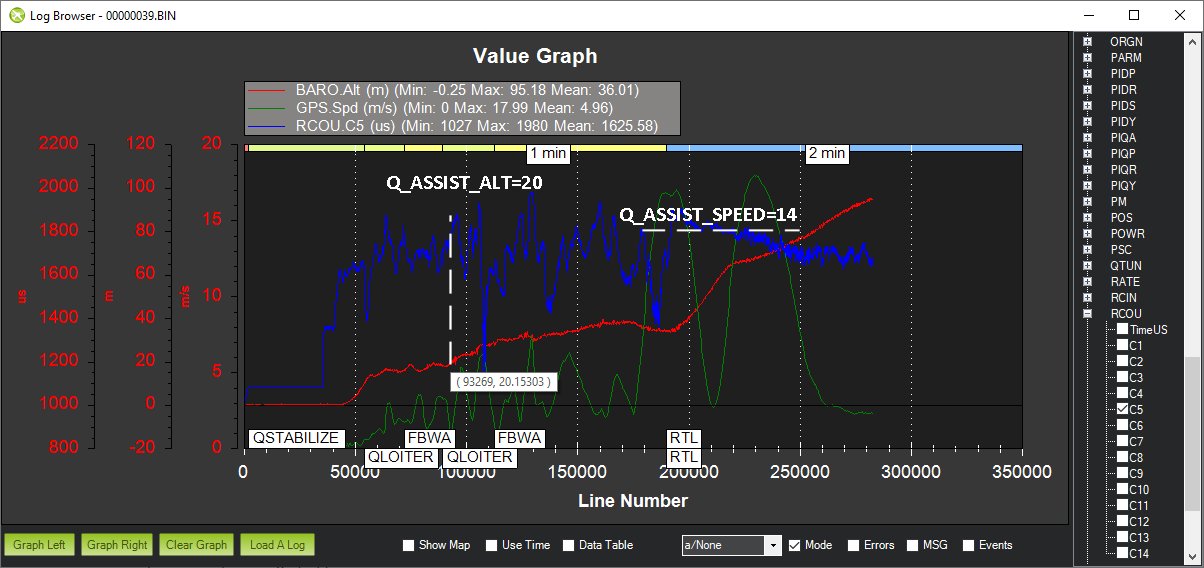
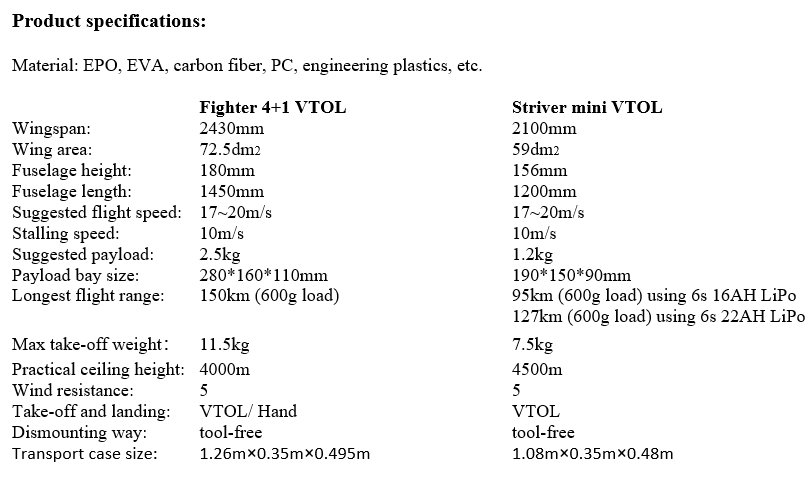
On my 2430mm Fighter VTOL, the Q_ASSIST_SPEED is set to 9 m/s. On my mini Talon VTOL, it is set to 14 m/s.
Setting your ARSPD_FBW_MIN to a few m/s above stall is a good idea but also depends upon your setup and how you fly. Since I usually keep my throttle at mid-stick position, I want the automatic throttle modes to keep this speed when I change from FBWA to CRUISE to LOITER, etc. I usually set my ARSPD_FBW_MAX speed to allow me to keep speed consistent. You can open or close this speed window based upon your preference.
Under normal circumstances, your Q_ASSIST_SPEED of 14 m/s should have been fine. I would base this on your previous successful flights in FBWA mode. What speed was your plane flying well at?
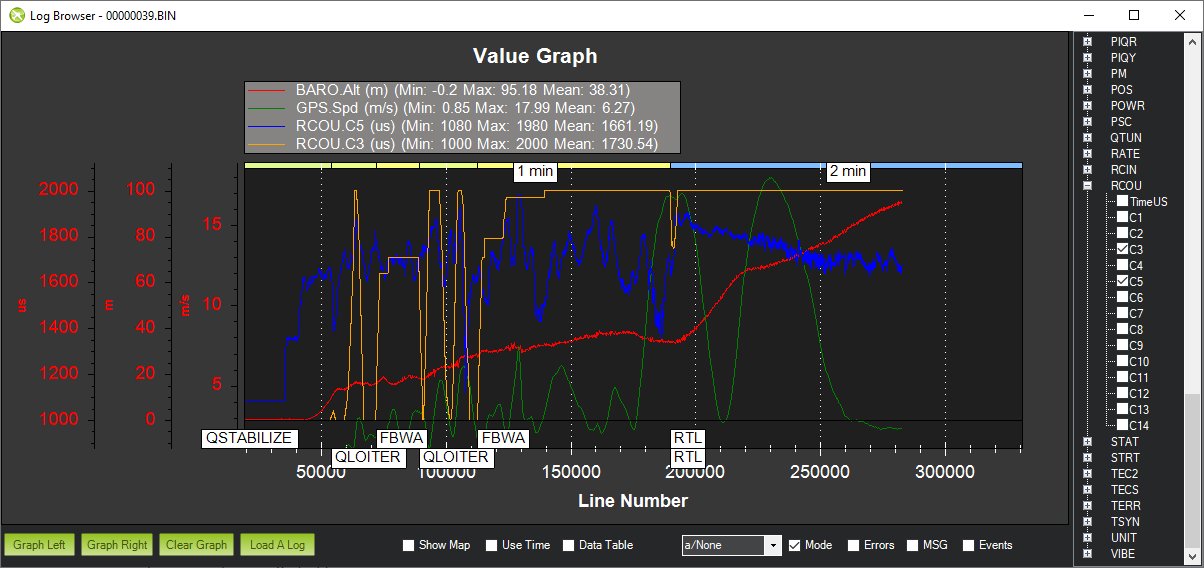
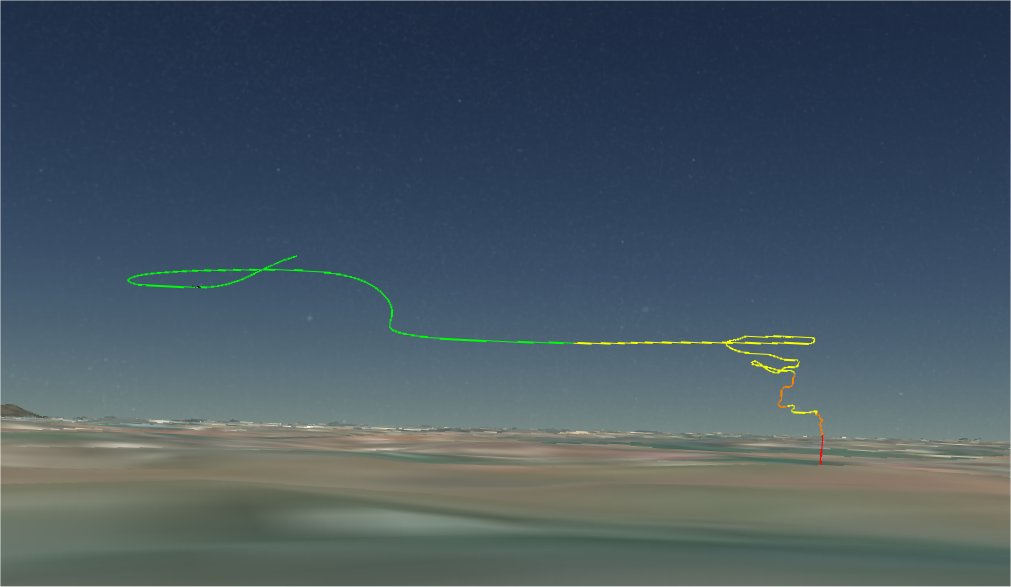
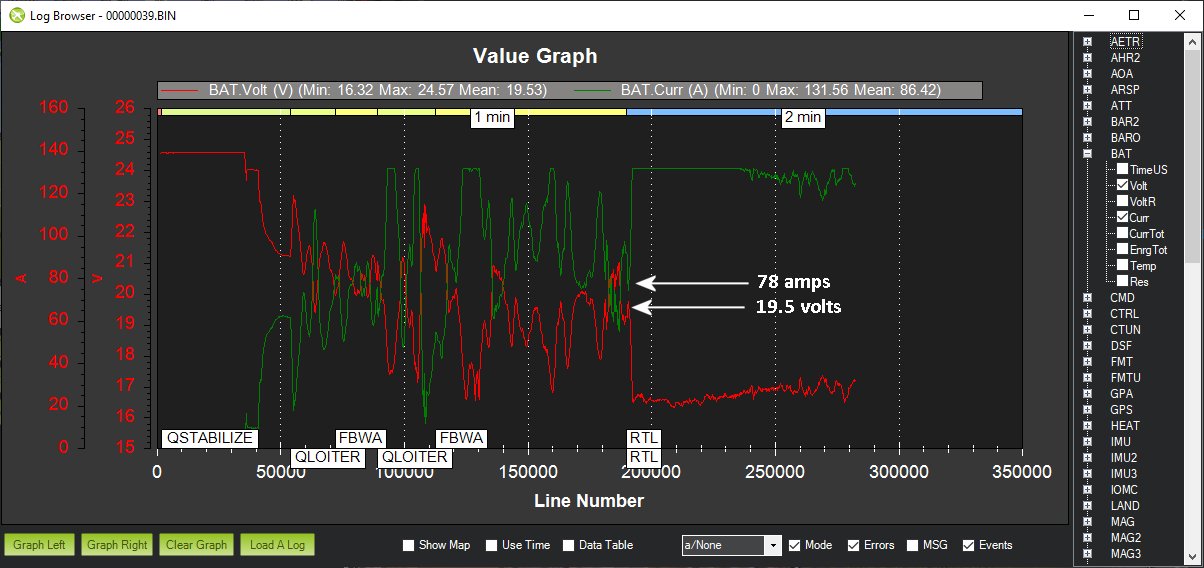
For some reason, you had no speed when you switched to FBWA mode and barely got above your Q_ASSIST_SPEED before switching to RTL. In hindsight, switching back to QLOITER would have preferred. On VTOLs, your emergency fallback mode is QSTABILIZE or QHOVER or QLOITER.
I can’t argue that point but it is recommended by the WiKi. The main idea is to not have all these features arbitrarily enabled on your initial test flights. You could set Q_ASSIST_SPEED to something low like 5 m/s. I also keep the previously tested QLOITER mode in my mind for a quick change to save a bad transition.
It is suggested that you do initial flights with Q_ASSIST_SPEED set to zero just to test the basic functionality and tune the airframe. Then try with Q_ASSIST_SPEED above plane stall speed if you want that functionality.
I also noticed that you had ARSPD_USE set to 0. While this is recommended for the initial test flights until you can test the AS calibration (which can be done after the maiden transition) it does open the door for some odd transitions at times.
Warning
If you are not using an airspeed sensor, airspeed will be determined by the synthetic airspeed generated internally as a backup in case of airspeed sensor failure. This estimate can be very inaccurate at times. You may want to consider not enabling Assisted Fixed Wing Flight if not using an airspeed sensor to prevent false activations when airspeed really is above the threshold, but is being misrepresented by the internal airspeed.
So there is a lot that can go wrong, even when you do things right and have a methodical approach to testing. I’ve had planes and VTOLs fly great for years and then decide it’s time to misbehave. It tends to happen when I become complacent and fail to expect the unexpected. We are always learning and sometimes re-learning. 
Cheers!