today I was testing a delivery flight plan with the arduplane 4.4.0-dev firmware.
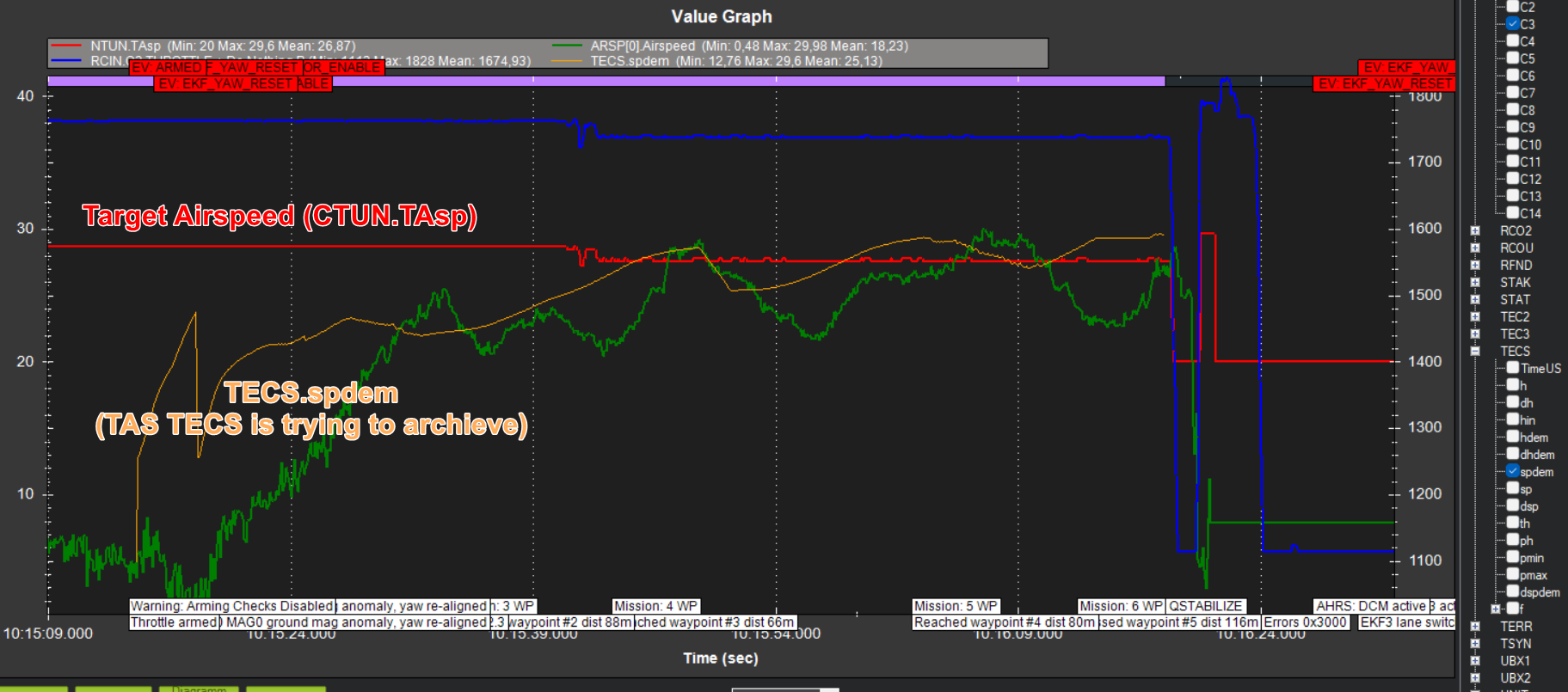
As you can see in the log, the target speed changes while flying, and the target speed set is 20 m/s.
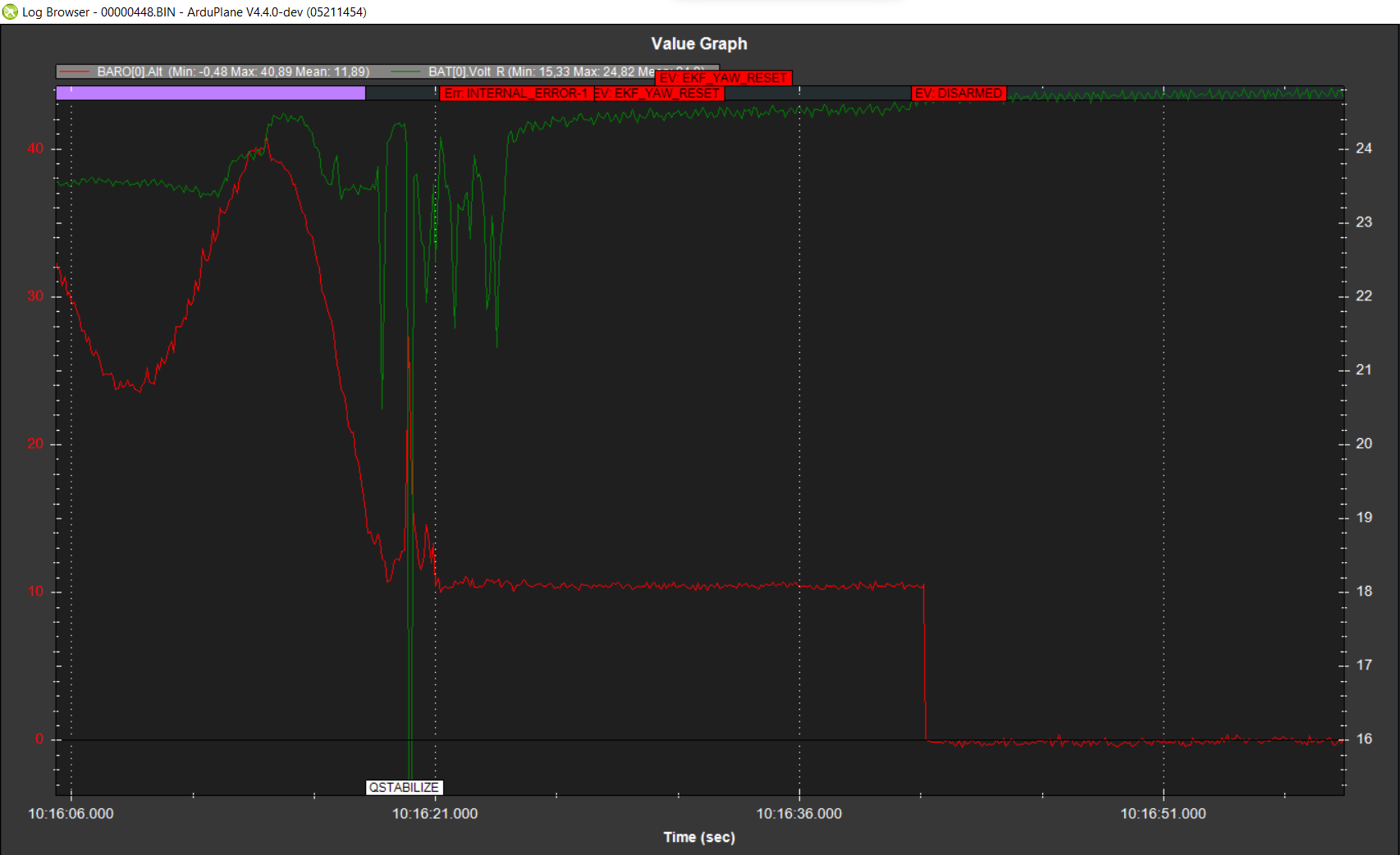
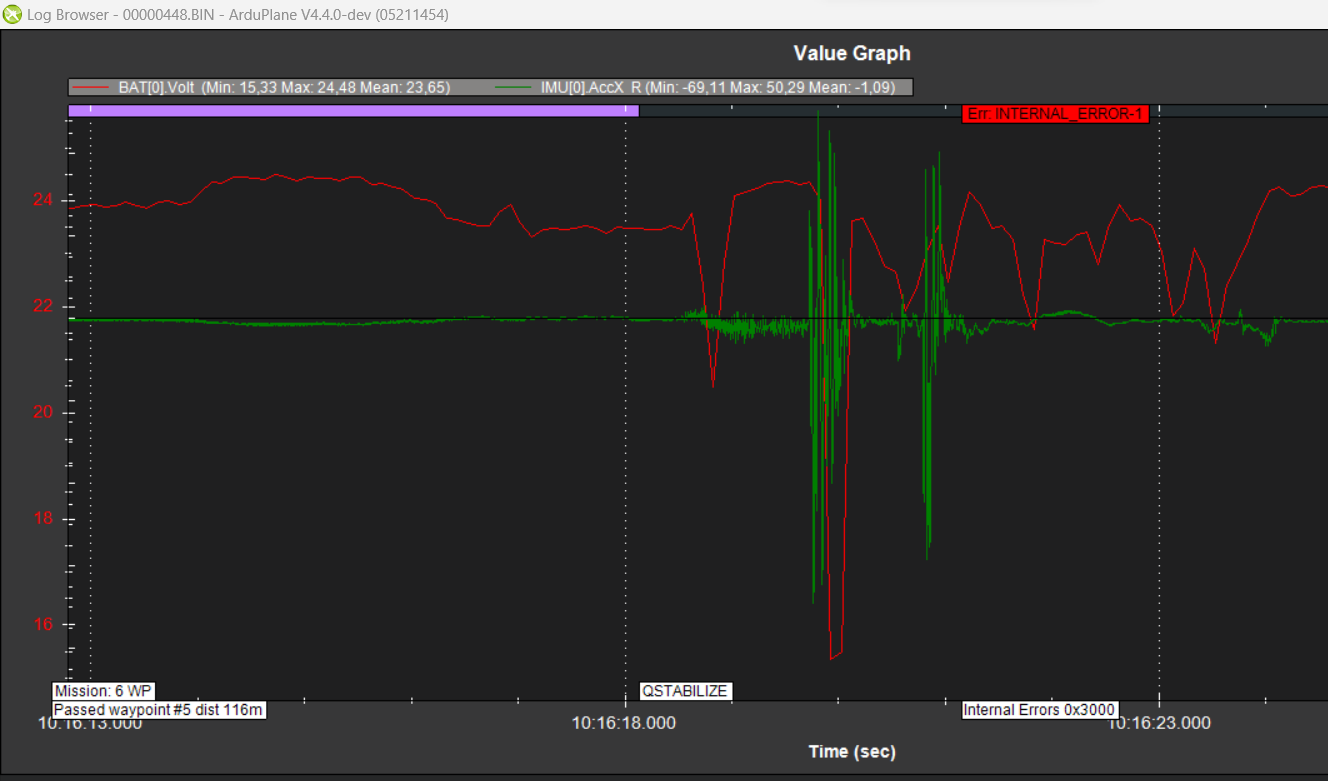
As you can see, while the target speed is changing the plane is trying to increase and decrease the velocity, reaching maximums of 28 m/s, entering in a oscillation that ends with a crash because the altitude decreased a lot in no much time (5 seconds aprox).
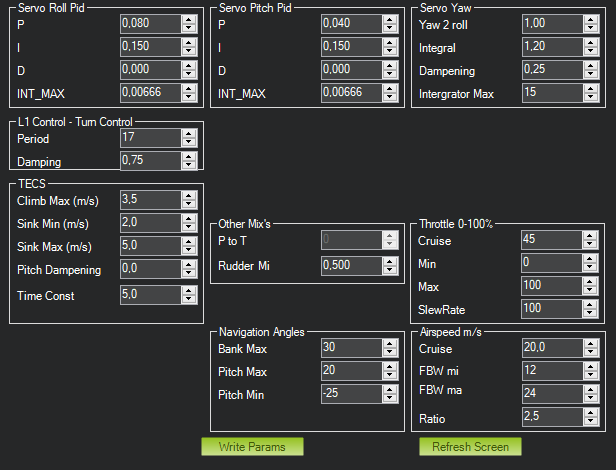
The increasing altitude oscillation in phase with the speed changes could perhaps be favoured by poorly PID values. Just one question: Have you done autotune and adjusted the TECS parameters ?
Another side note: You started with the preflight check switched off. This is not a good idea.
But I have not yet found out for sure why the plane crashed.
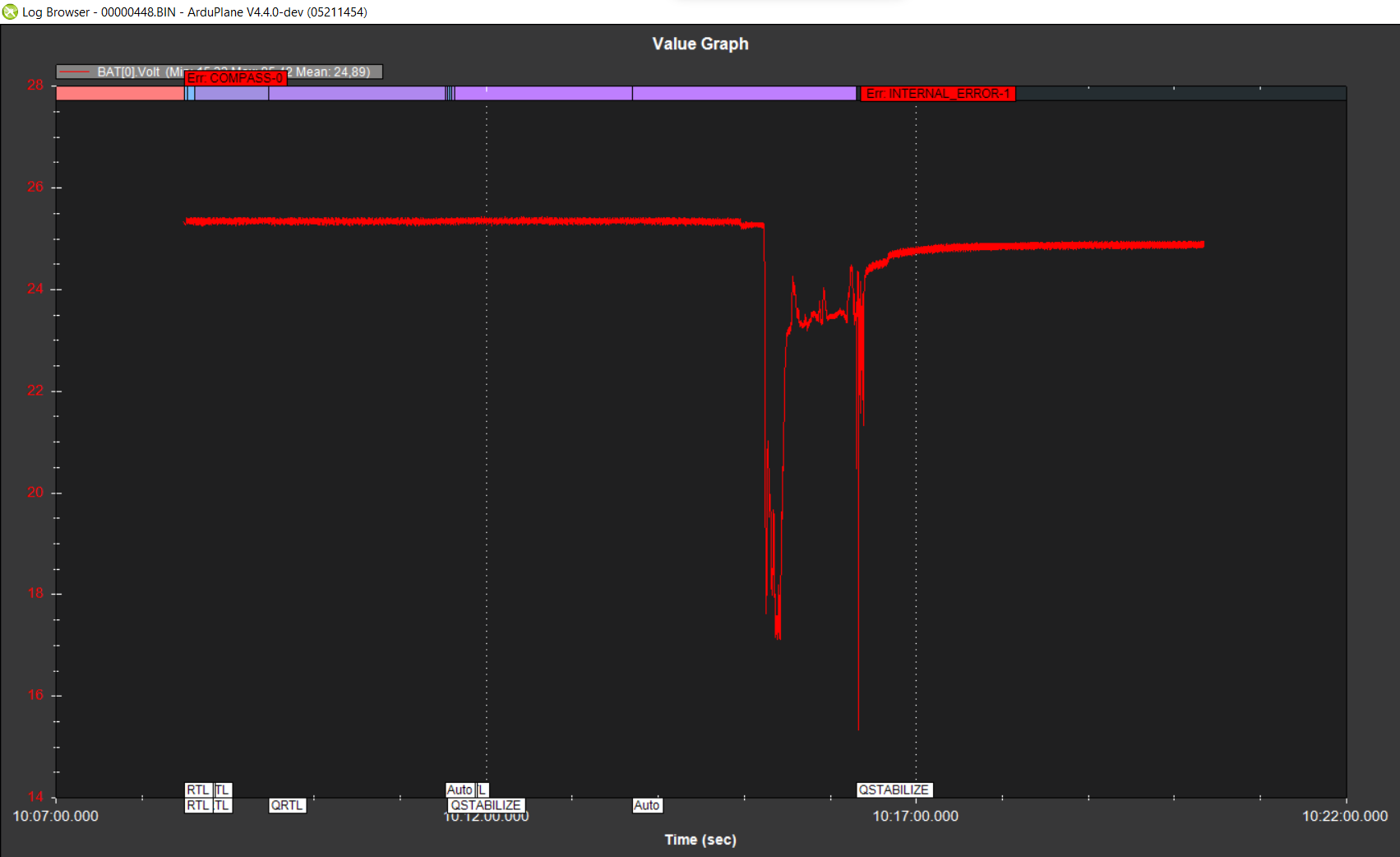
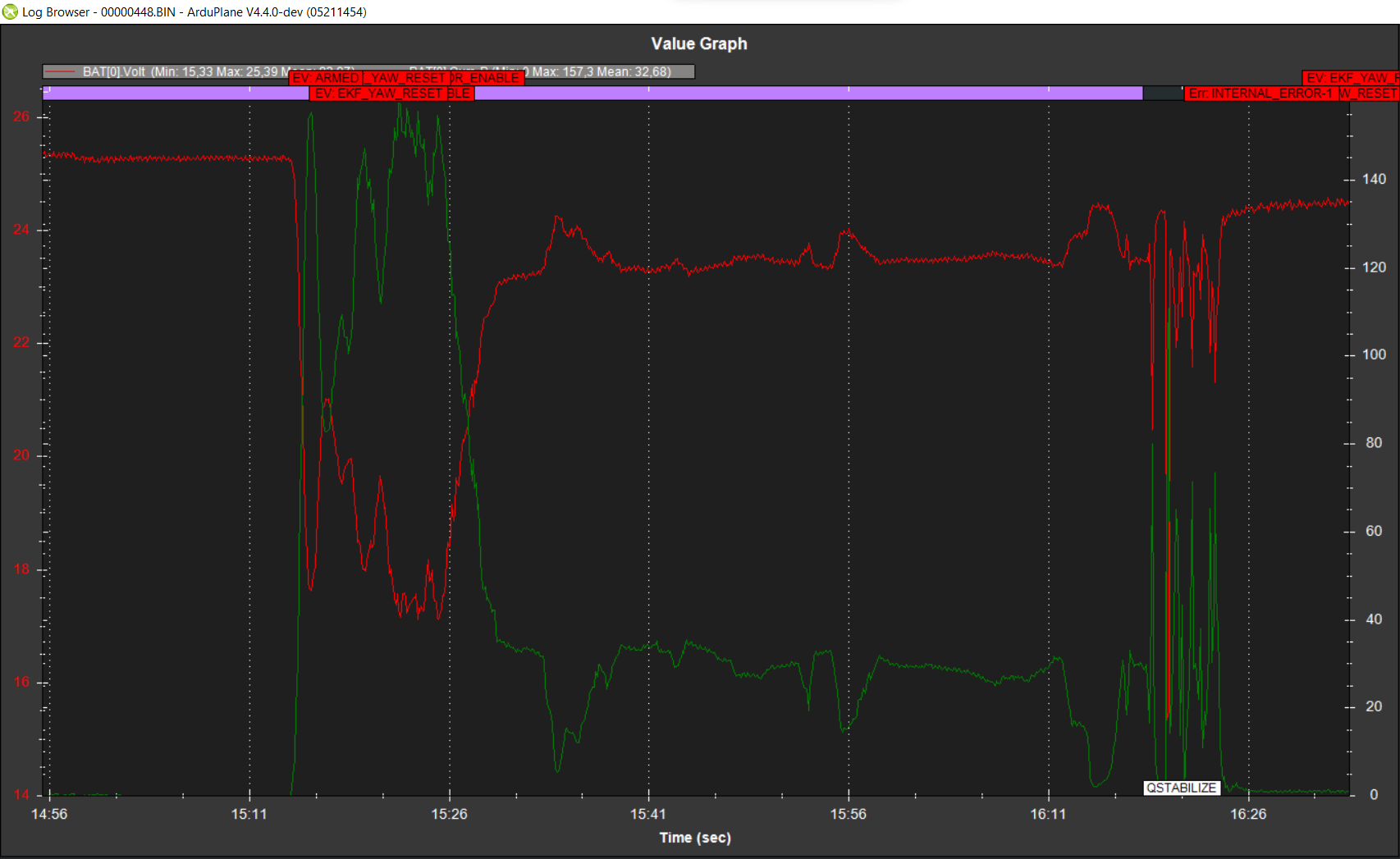
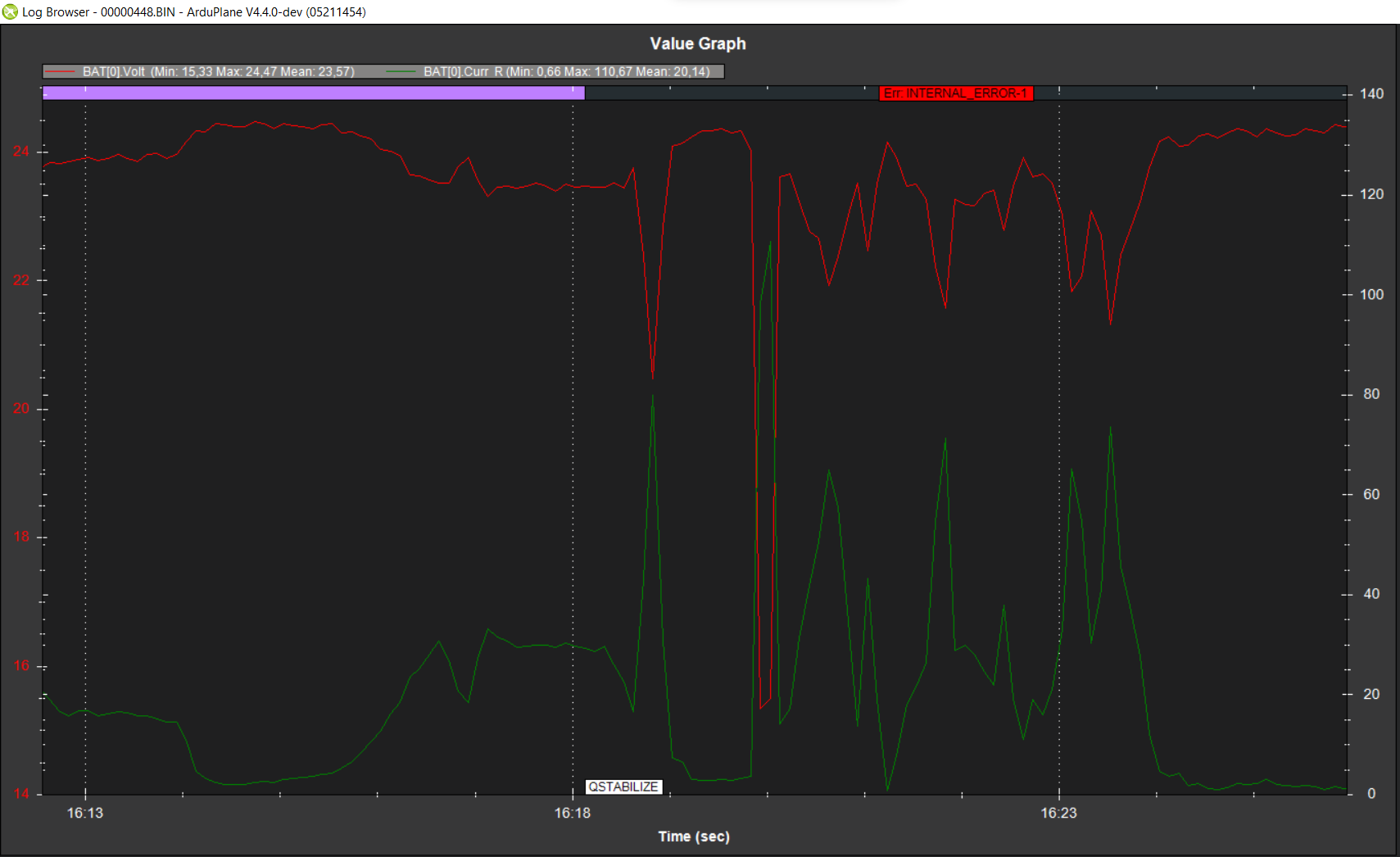
thank you so much for your response. I see this voltage drop and I think that is after the crash. So the problem I think that comes from another source of error. Hpwever, we will check the battery status. We are using a 16000mAh 6S LiPo battery.
thank you for you analysis. We checked after the crash that the THROTTLE_NUDGE was abled. This could be the source of error because the pilot always put the stick up just in case to pass to Manual mode to reduce the response time, but in this case maybe this could afect on the crash.
Also, as you mentioned, Iswitched on the preflight checks.
About the PIDs and TECS, were taken from another VTOL platform similar that we have that works well… maybe we need to do a new autotune and readjust the TECS.
About the Target airspeed at almost 29 m/s, the only source of error is the stick of the trasmitter right? Because the it is set at 20 m/s: