We are operating a Quadplane (VTOL) 2.1 M wing span, fitted with Cube Black .During a regular flying exercise, we took off in a QLoiter mode and it was hovering above about 3-4 m, suddenly it crashed to ground, attaching the Log for reference, would like to know more from experts what would be the cause. https://drive.google.com/file/d/1fs-HjZ5OaLFrzJ000zq7gig1nQNVmCFr/view?usp=share_link
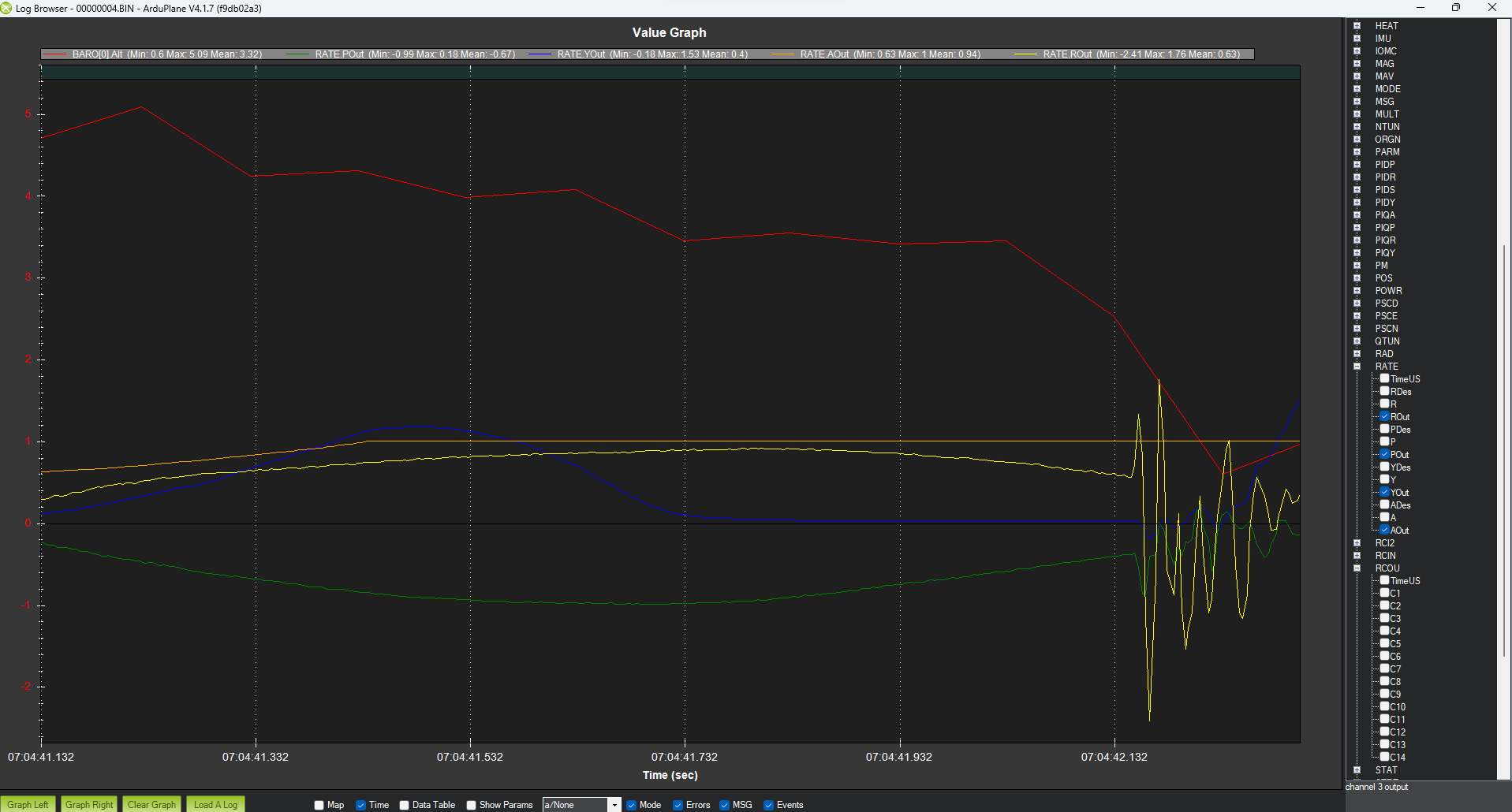
Judging by the normalized outputs for roll, pitch, yaw, and altitude, coinciding with the sharp altitude drop, I would wager a guess that it is the thrust-to-weight < 2 problem.
When thrust-to-weight is less than 2, and roll, pitch, or yaw are saturated (or their combination), the aircraft WILL drop. You can see AOut is clipped to max, meaning the the craft is giving all its allowed for keeping altitude.
Your thrust-to-weight MUST be >2 if you do not want surprise altitude loss. You have three options to fix surprise altitude loss:
Increase thrust-to-weight > 2 (for lowest battery charge in your mission!)
Tune or otherwise prevent attitude control from saturating
Modify the code to handle thrust-to-weight < 2 (i can help with this if you need).
edit: what is your thrust-to-weight btw?
thrust-to-weight is especially critical for quadplanes because the big ole wings can easily saturate control when there is sharp maneuver and/or gust of wind.
edit: this is assuming quadplane mode uses AP_MotorsMatrix code. if not, nevermind!
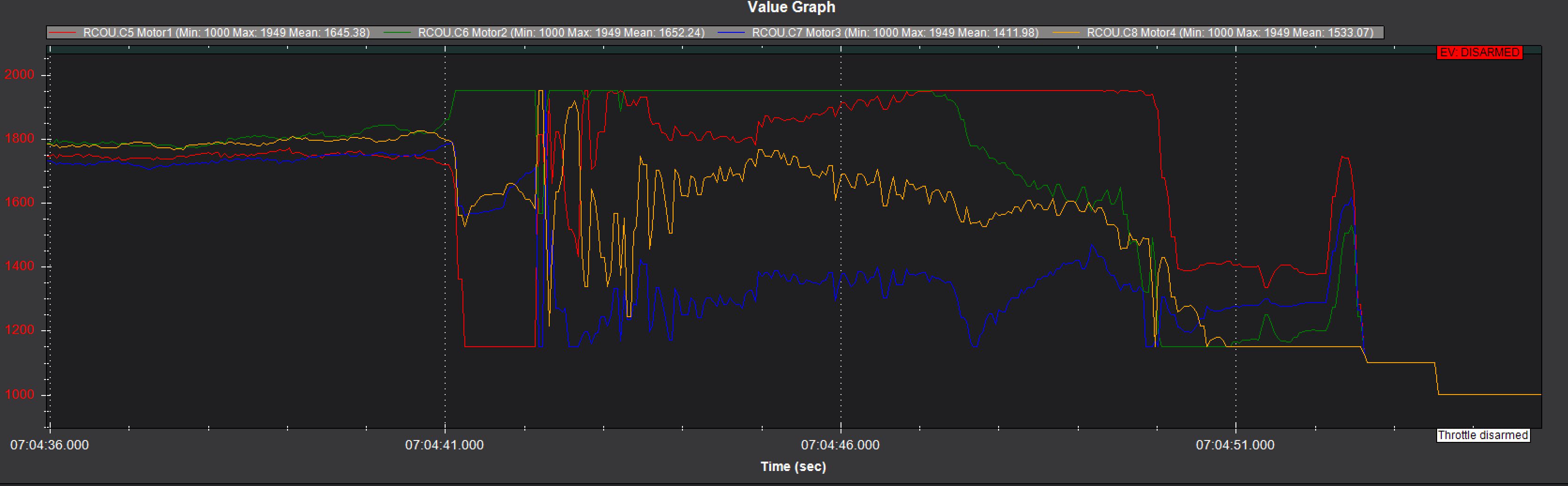
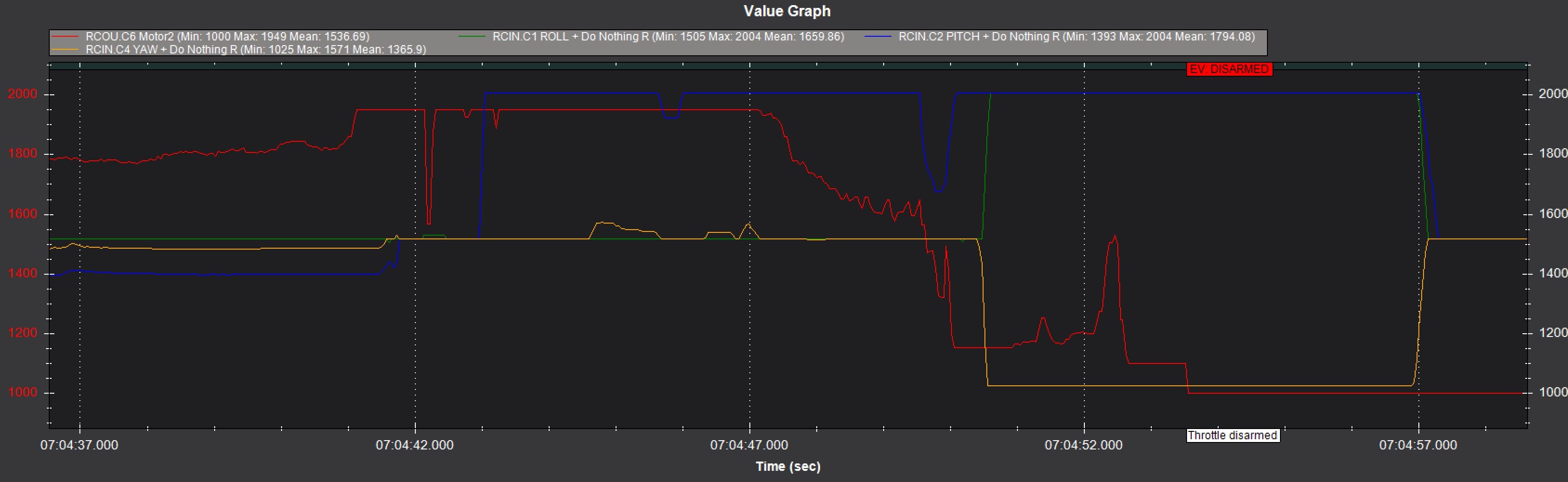
I’m sure the thrust/weight condition contributed but it looks like thrust failure of Motor Output 2 as there was no control input until after it was pegged. No doubt the pilot trying to save a bad situation.
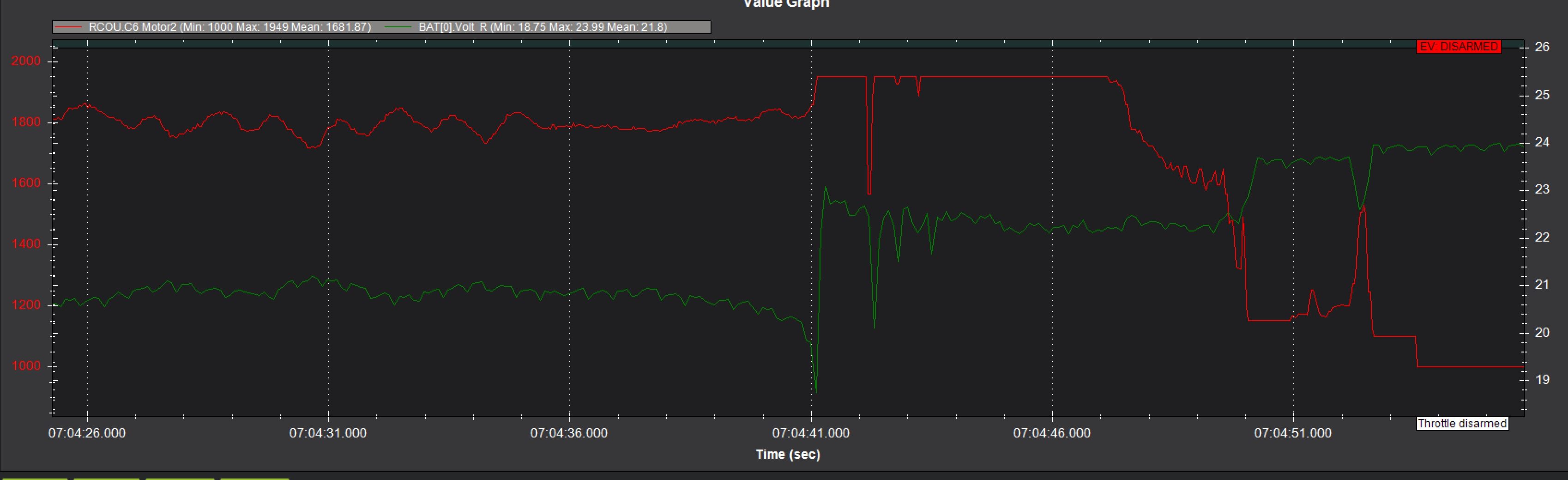
Thank you very much for your reply , yes i am waiting for the field video to post here, during the event, we noticed M2 stopped and later we observed bad smell, usually gets from electronics when they smoke out. Specially during Quad mode , the model seems to be pulling more power to keep it in air.
Thank you very much for your observation , as said above it experienced M2 failure , ill attach the video as well, but your points also add up to the condition of the quadplane, I observed in quad mode it is pulling lot of voltage, in another build of same configuration , we see during VTOL take off it is pulling about 40-50 Amps . This one is a RTF unit from China. So I need to check with them about how they configured it and key points you discussed, about a month back, similar model, went to a crash during auto mission in fixed wing mode , where during midflight barometer height got set to zero first and negative so the autopilot thought it got landed and it disarmed midflight, and it glided and crash landed.