We had a big crash with our 3.3m Vtol plane which resulted in a complete destruction of the plane because of the Lipo fire. We could find the SD Card and i did some analysis on my own. It was running 3.9.5 and uses a Quadrotor Setup and a Pusher configuration. It is on the heavy side with 20kg for the 330cm but it flys good at 25m/s and has a faster airfoil profile.
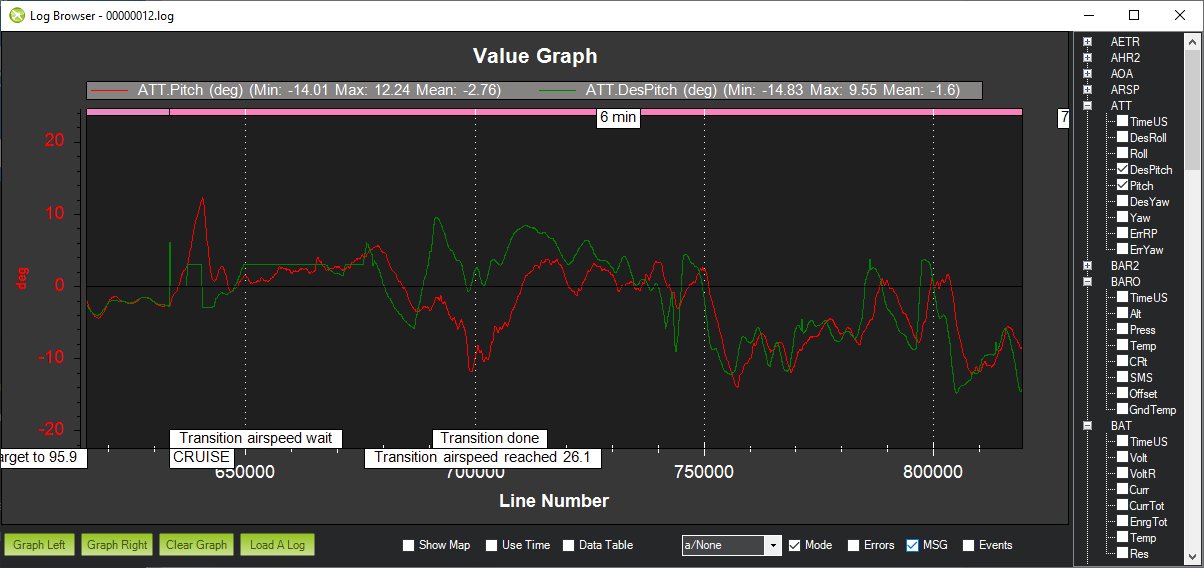
The Pilot was flying a course, with loiter and cruise in between, then a transition inflight to qloiter and back to cruise. In the end he wanted to lose altitude, do a flyby, lose more altitude and do a transition. He said, the plane was not reacting to his inputs to pull up, he tried different things and maybe even switch to qloiter/transition short before impact. But the plane kept the attitude and sank till it crashed.
I don’t want to bias your analysis, so i keep my findings for now to myself.
What do you make out of the log, do you see any technical problems, tuning issues or any other explanations for the crash?
Thanks in advance for your help, i think this log is quite interesting.
Sorry to hear about your crash. Can you please post the .bin file? It will need to be hosted somewhere (like WeTransfer) because of the size of the file.
I was just uploading the file, while you were typing. When i uploaded the post, i didn’t catch that the file was too big and it failed.
Feel free to ask any questions!
We are having several problems or issues with our setup, but i think i will open new threads for each. (the setup is flying good, and the ardupilot is doing a nice job. But there are some kinks to be ironed out, like the landing detection where we maybe could be some help in testing)
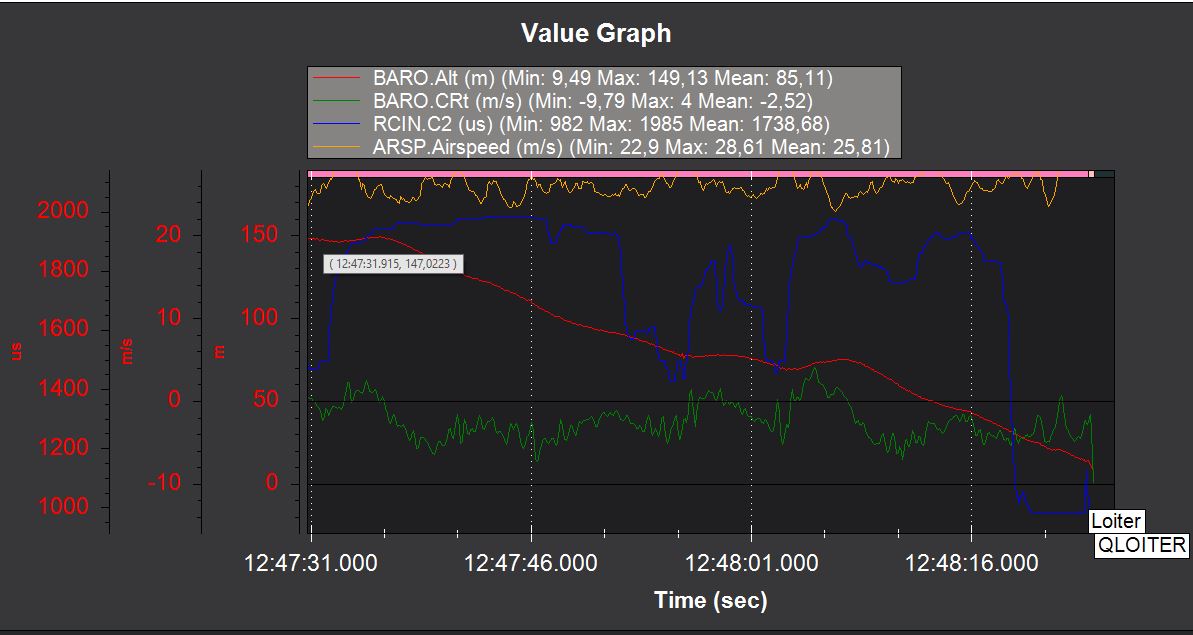
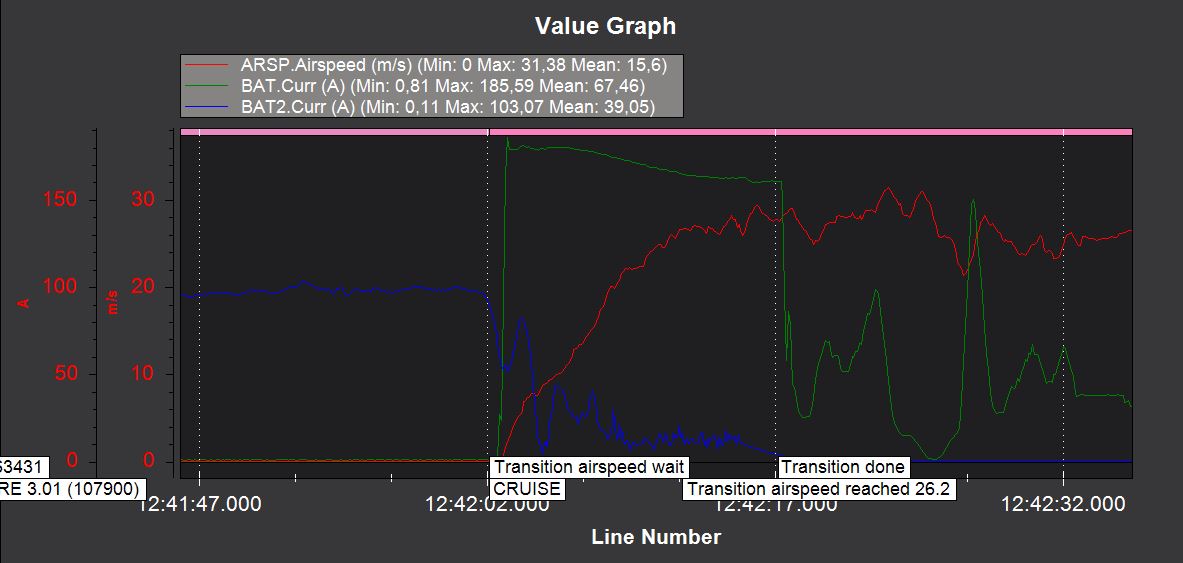
Things appear to be ok. The speed was consistent around 27 m/s but the altitude continued to fall in a controlled manner. One of my suspicions is that the pilot was not aware of how CRUISE mode works and would have preferred to be in FBWA mode for normal control of the vehicle. Typically, I only keep it in CRUISE mode when I don’t want to change anything except for maybe a new course heading. Otherwise, I use FBWA mode.
You can replay the flight using the .bin file in the UAV Log Viewer.
Also from me welcome to the VTOL area. Fortunately, no human being was harmed (20 kg at 26 m/s is not something I want to stop with my body) .
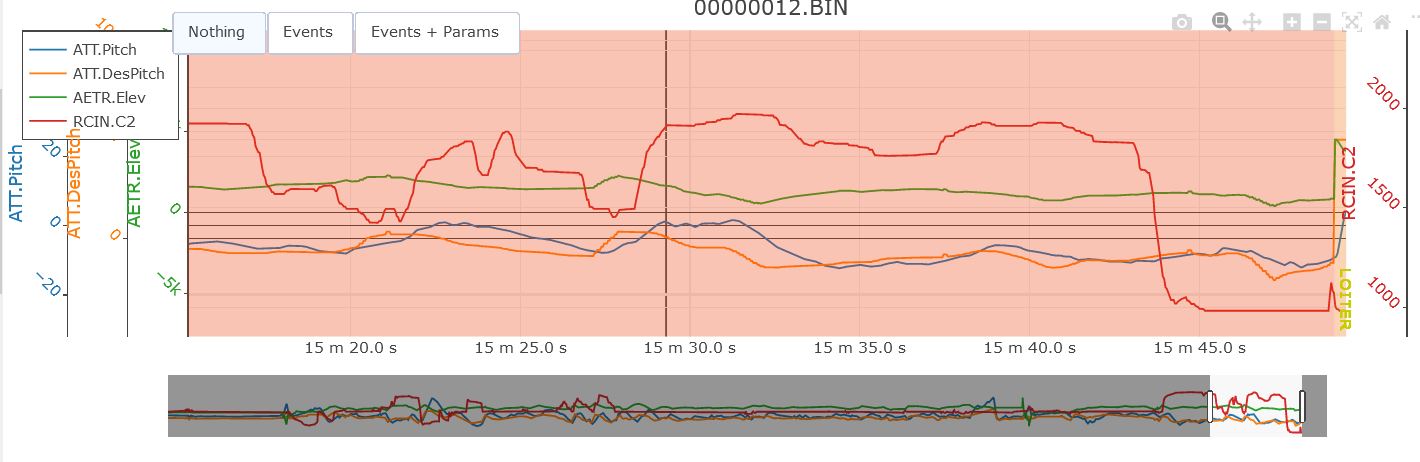
Like @GregCovey, I can also see no fault in the function of the autopilot. Climb and descent responds to stick input. Even before impact. But the climb and descent controls is very very sluggish with your parameters.
When looking at how the TECS parameters are adjusted, it is noticeable that you have already made a gross error in the setting of ARSPD_FBW_MIN 26 and TRIM_ARSPD_CM,2600.
TRIM_ARSPD is the cruising speed and not the minimum speed slightly above stallspeed. (The stallspeed will surely be lower, if you look at the current consumption of the quadmotors during transition. They already have nothing to do at significantly lower speed. )
Hi, thanks for your answers. Why should he have used FBWA? The Plane is normally used for auto missions so our main goal is to keep everything like we will use it for the missions.
Yes, the plane is not tuned that thight, but it react quite well.
Is there anything in the logs where you would say, thats an anomaly?
@Rolf the pilot always set ARSPD_FBW_MIN 26 and TRIM_ARSPD_CM 2600 to never let the plane get any slower than 26m/s to keep it in the air. Can you think of any problems that this would cause? The stallspeed of the plane should be lower, but we have not tested it extensively, to not lose the plane, if the A-Tail ad the Vtol configuration is too hard to get out of a stall.
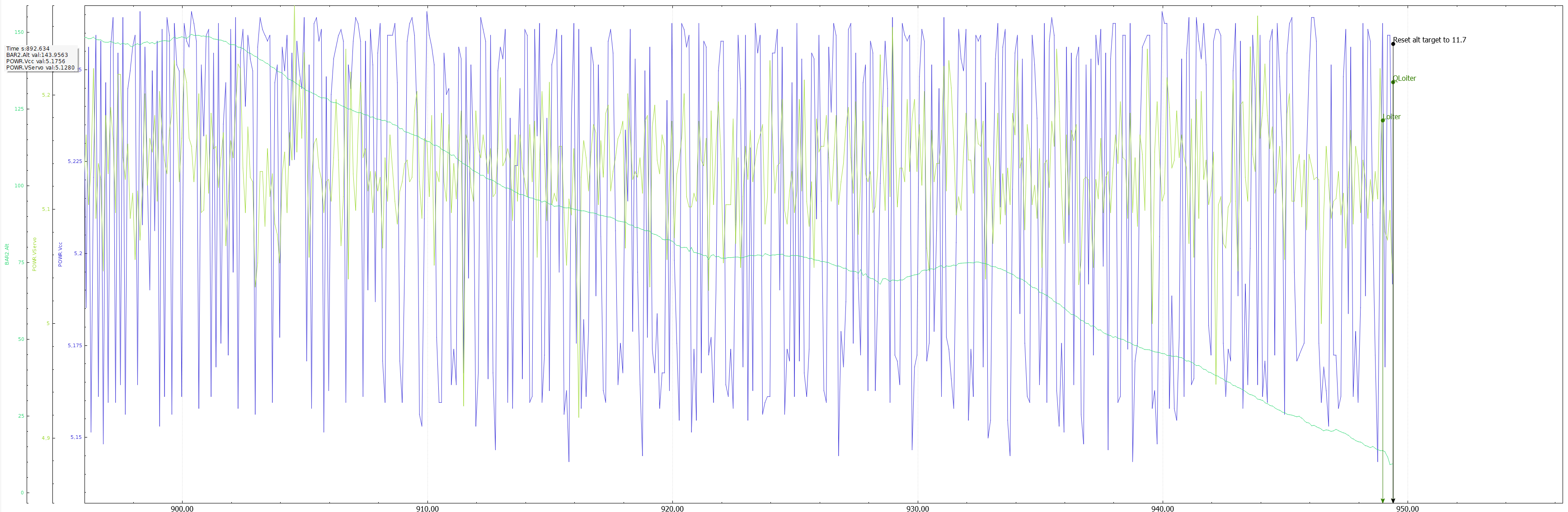
RCIN2 aka pitch is at min value, but the PID controller and hdem ar not reacting, only spdem is slowly and too late reacting to that very abrupt change in demanded pitch.
Oh that trick with looking ad the quadmotors is nice, could you elaborate more? In the transition to forward flight or back to copter?