hi everyone,
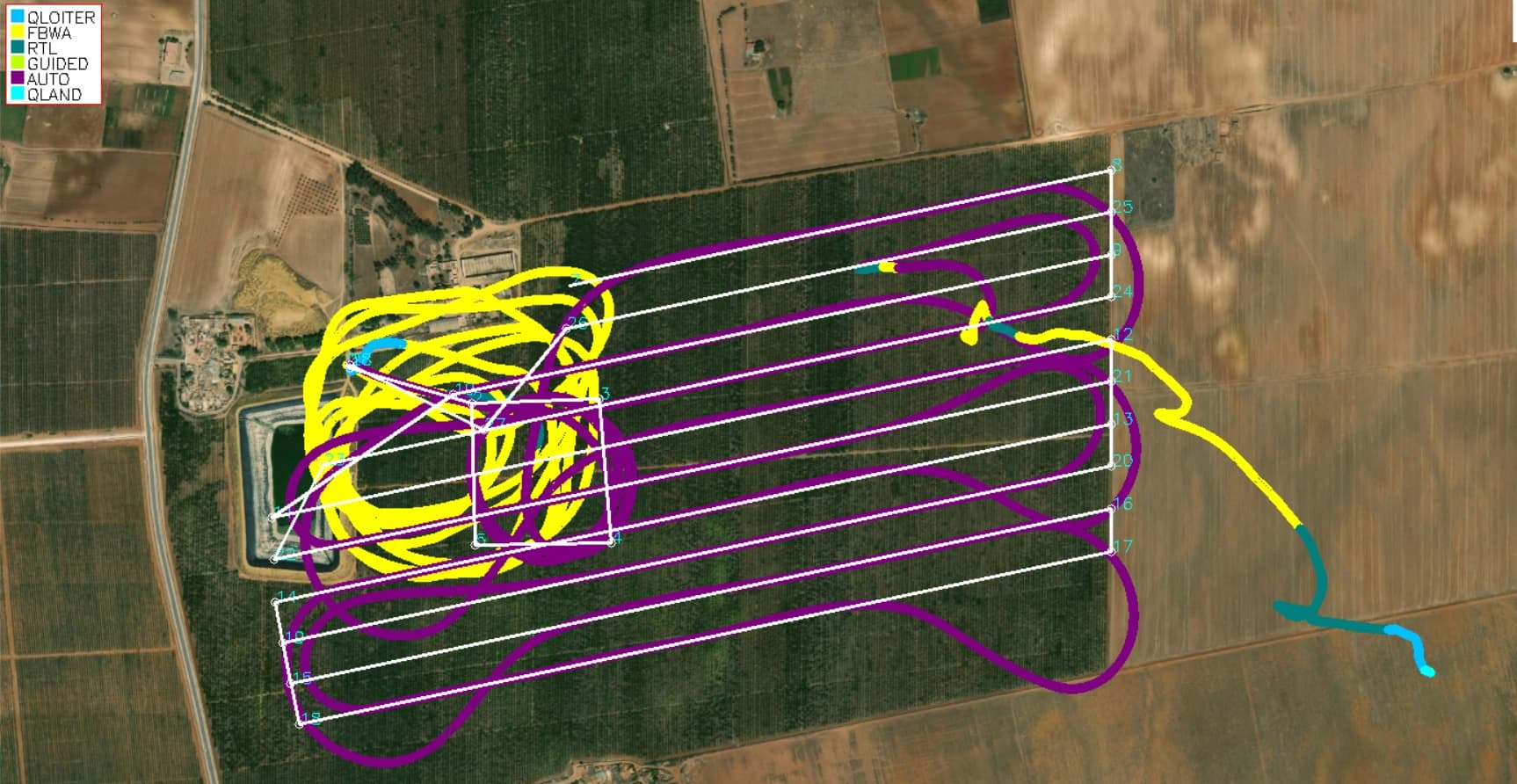
The drone took off on auto mode, after then, it started the automatic mission, it started the survey from WP7 to WP25. After WP25, it started to head back to the WP26 on auto mode. At 18:54 i switched to RTL mode as it was lost and could no longer be seen by the naked eye. The drone’s nose went up and gained altitude. At the same time, it lost airspeed until it transitioned to 18 m/s and approached stall.
When we lost eye contact, we switched to RTL mode until i was able to see the drone with the naked eye, then i switched to FBWA mode, and lost view of the aircraft once again, which led to us switching back to RTL mode, and i lost all control and telemetry.
When we went to the landing area, we found that the aircraft landed with some damages
My question is,
as you can see the logs between time 18:53:30 - 18:54:09 it turned 180 degrees without any command because of magnetometer was not consist with gyros.
Could you please help me about this subject?
thank you