I hope all are doing well in this pandemic. Take care!
Recently i faced a crash. The reason I deduce seems to be Autopilot shut off, but why did that happen is puzzle to me!? After the crash happened. We tried to power the autopilot and it worked fine(still installed in the fuselage). Checked the airspeed reading…seems to be fine.
Here are few observations from the site:
As soon as it was armed, all the 5 motors(including cruise motor) started rotating- probably becuase of mode.
The autopilot was not accepting pilot commands. It was moving away, executing random modes.
Suddenly it flipped and fell.
Can anyone please help me up with the issue. Y did the crash happen? If it was autopilot shut off, then why? what can be the root cause for this?
I have attached the .bin file for reference. VTOL Crash log
Sorry to read about your crash. However, I will try to answer your questions.
Your Q_M_SPIN_ARM is set to 0.1. This allows the quad motors to spin slowly when armed. It is meant for safety so you know the vehicle is armed. You can change the setting to 0.0 to keep the motors from spinning until you raise the throttle.
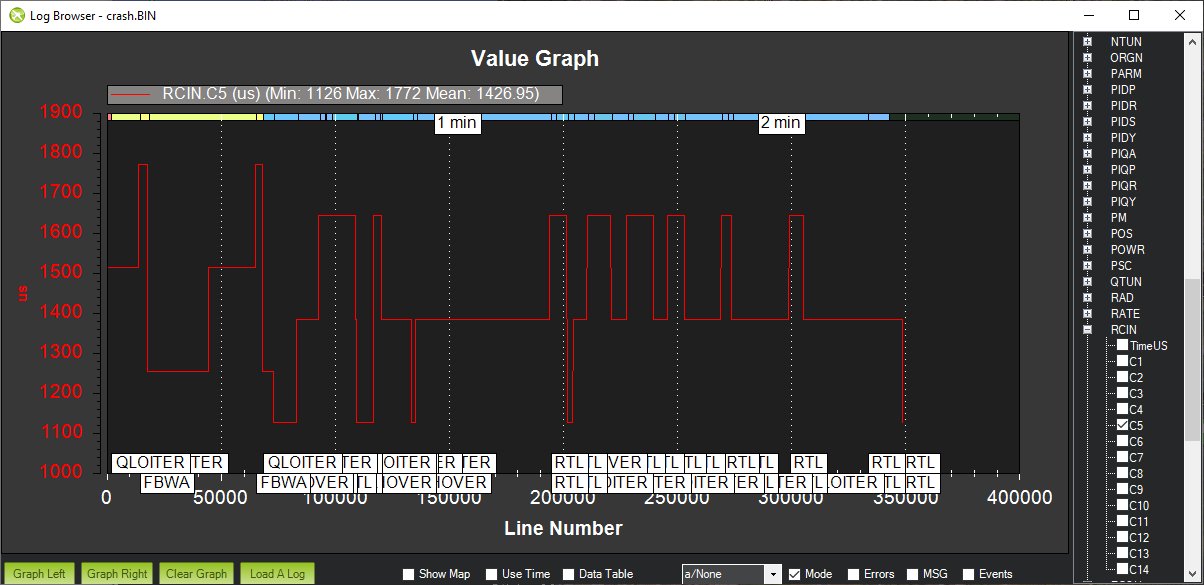
Looking at the image below, it appears that your channel 5 (FLTMODE_CH=5) was always changing flight modes. I would suspect an R/C radio or link issue here.
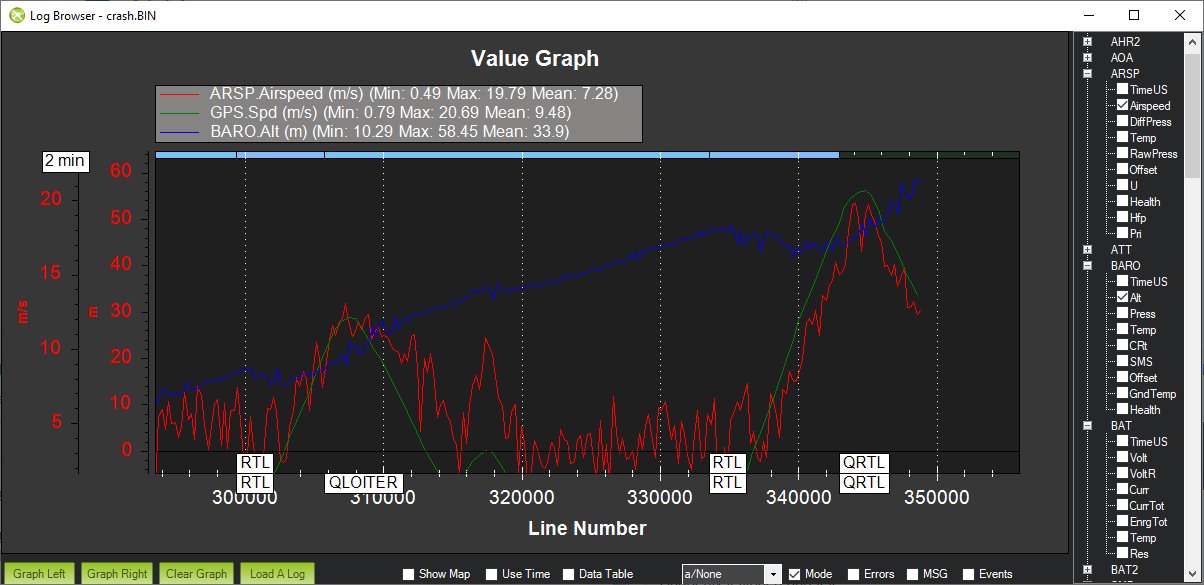
It does look like the Pixhawk reset or the supply voltage cut out. However, it was in RTL and QRTL modes which is why you could not regain control of the VTOL. I would look into your R/C radio link and verify that you have proper mode control before arming the plane.
You cannot change modes rapidly like this and expect the plane to fly properly. In one minute, the mode was changed 13 times where one of the modes, RTL, was autonomous. You need to go back to the basics and start again with hover testing; QSTABILIZE, QHOVER, and then QLOITER mode.
Only QLOITER mode will attempt to hold position. This is difficult on a plane with wings so it must also be facing into the wind for better performance.
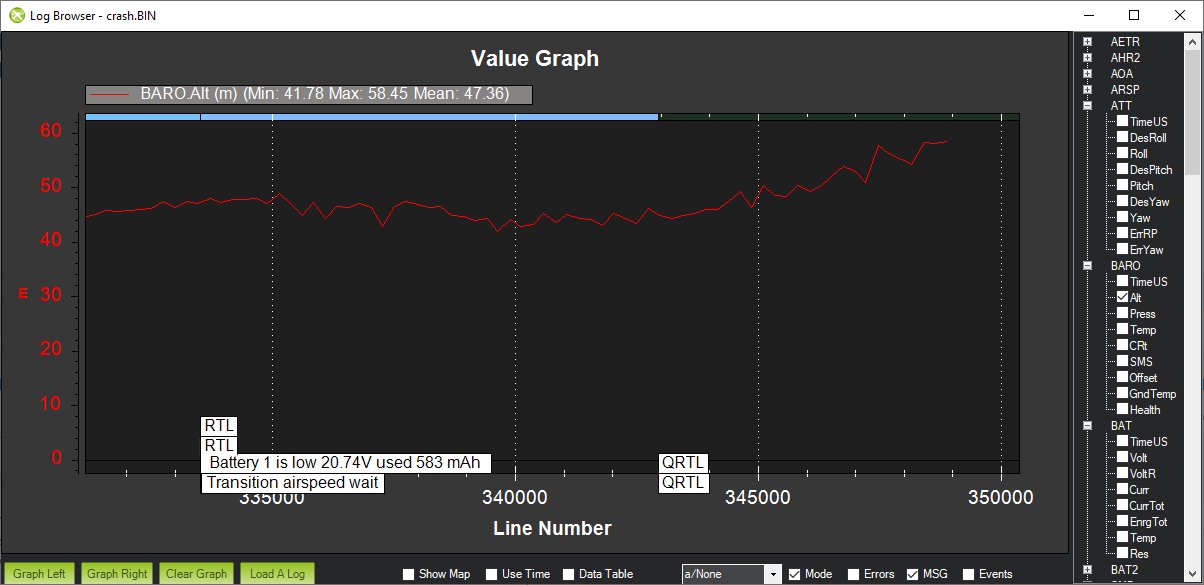
It would appear that many of your mode changes may have come from the parameter settings. Looking at the image below, the Battery 1 alarm measured 20.74v. Here are your BATT_FS settings.
So the plane is in a battery failsafe condition of RTL, which is why it ignored pilot mode commands. On my VTOLs, I disable failsafe conditions until after testing and then use log values when possible from actual flights.