Hi everybody,
On the last flight my VTOL had an accident because on the descent to only 3m from the ground, all 4 motor stopped.
This VTOL has flown many times and has never had any problems, also I made a flight 20 minutes before and it worked well.
I have looked at the logs but I don’t see any apparent problems.
Any help is welcome, thanks in advance.
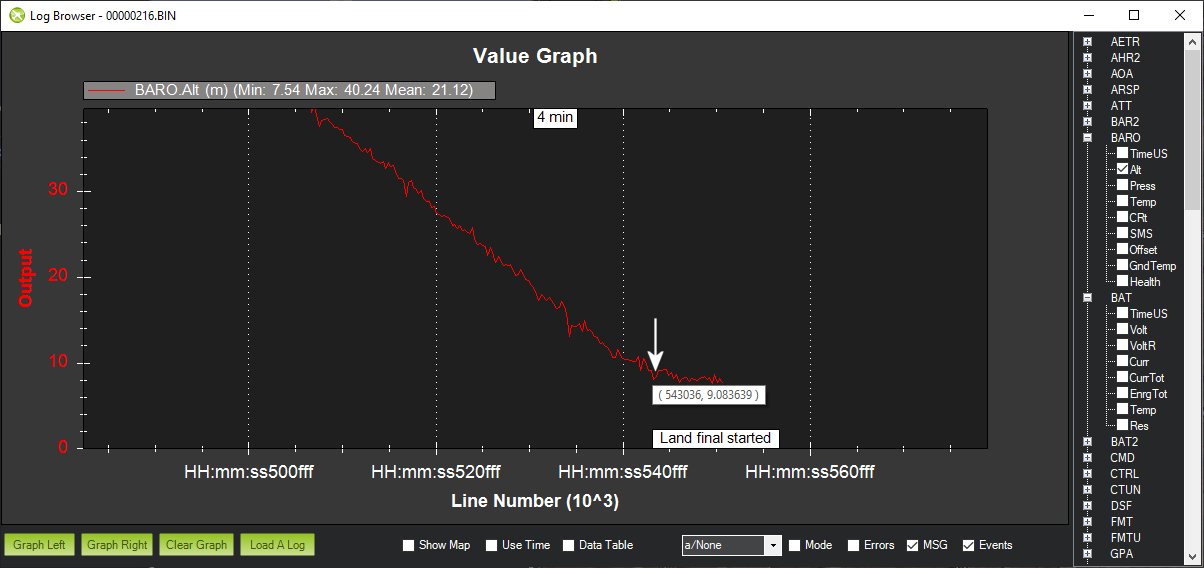
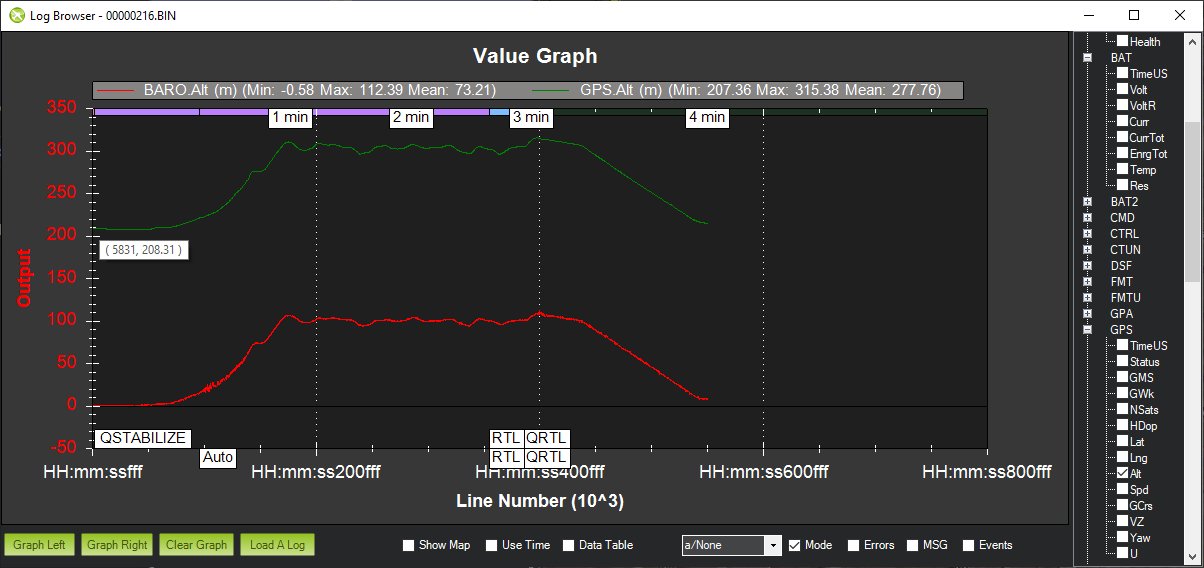
Yes, the logs show a normal behavior and I am not certain why the Baby Shark VTOL stopped descending after it hit the “Land final started” sequence. The logs clearly show the VTOL is about 8-10 meters above ground. Q_LAND_FINAL_ALT is set to 10 meters. Also, when looking at the motor control signals C5-C8, it appears to want to hover when the “Land final started” phase is initiated. Also, I see no issue with the RCin controls from the receiver.
One possibility is that the flight controller reset and another is that the power to the flight controller failed. Either one would stop the logging and crashed the plane. This may explain the lack of error messages and sudden drop from 8-10 meters.
If you bought it from F**tech and did not took it apart and put together again by checking cables, solder joints and connections, Then it is totally “normal” behavior
I’m telling this based on experiences with couple of large UAV’s and Baby Sharks sourced from there.
How do you control the engine ESC’s is it DSHOT, Multishot, PWM? Could it have been a de-sync or something at the esc’s? Probably on transition if the engines are not “braked” they were winding reverse direction, this could cause problems on wind-up possibly.
I’m new to ArduPilot so do not take my input to seriously, however i have quite some experience in homebrew quadcopters running BetaFlight and the likes.
Dual power means using both batteries ? (Lift, and plane) if yes, then it narrows down to cube HW or firmware issue. Did you checked the Cube after the crash, can it be powered from the power ports ?
Hi @Eosbandi,
yes i use dual power using both batteries.
I checked the cube, BECs / Mauch sensors, ESC, motors and everything seems to work fine.
I will continue to check and keep you posted.
Did you find the problem, what are the ESCs are you using for the VTOL. Can it be a brown out or intermittent short. Due to power sensor failure. Did you check the connections right after the crash?.
Did you find the problem, what are the ESCs are you using for the VTOL. HobbyWing 100A HV
Can it be a brown out or intermittent short. Due to power sensor failure. I did not find anything strange, I repaired it and did a flight test in FBWA mode and everything worked correctly.
Did you check the connections right after the crash? Yes.
Also do you have MOTORS_EMERGENCY_STOPPED feature of Option 31 enable? I can’t find this parameter at arduplane 4.0.1