Hi,
I am looking on a solution around VTOL auto mission where the craft takes off, flies a couple of waypoints, lands in another location away from home, disarms, waits specifically for a button press, arms then takes off and continues a mission or RTL.
At the moment, I have only seen one implementation as was described on Andrew’s tutorial on how to resume a mission after landing. Advanced ArduPilot Mission Planning - continue after land - YouTube. His approach is landing > disarm using an Aux function > delay > arm using Aux function > takeoff > continue.
However, I would like to purposefully use a button press on the site of first landing.
Another good example of this implementation is on this plane that also uses ardupilot YANGDA VTOL Drone For Long Range Package Delivery - YouTube.
My guess is that i’d have to execute a LUA script for this and I have already seen example scripts on button state ardupilot/button_test.lua at ArduPlane-stable · ArduPilot/ardupilot · GitHub
However, I have no idea on the wiring diagram for the button, where to plug it on a pixhawk cube orange and how to listen to its pinout location via the script inorder to send arming mavlink command via lua script.
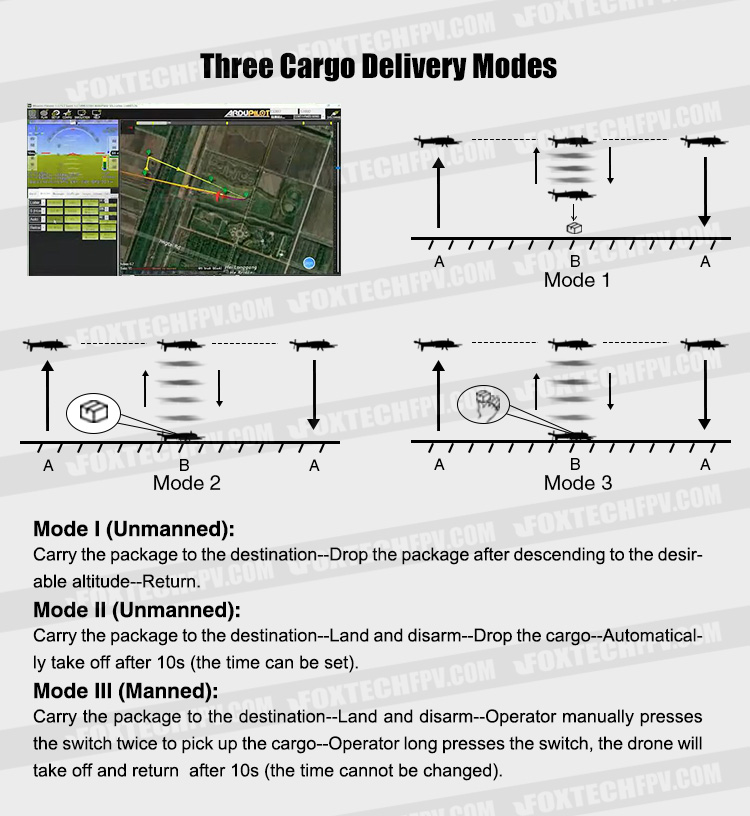
Also not sure why it explicitly says that the craft will arm and takeoff after ten seconds and its cant be changed.
Kindly advise.