Hi All
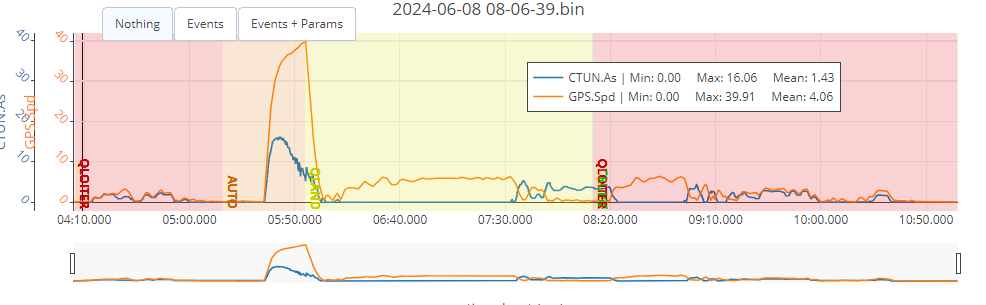
After updating the firmware to the newest 4.5.3 in my VTOL it failed transition after about 1mn of fly and the plane was far away from me it switch to land mode.
i noticed that is a speed problem because the speed in CTUN was about 16m/s where in gps was about 40m/s .
Kindly look into this problem.
here imy log file:
(2024-06-08 08-06-39.bin - Google Drive)
1 Like
Hi All,
Today flight is okay after activating Q_option_19 and changing Q_fail_act to return home, note that Cube Orange Plus with F9P RTK GPS was a good Choice.
Any Feedback is much appreciated especially with CTUN.AS and GPS.Spd difference.
Thank you.
I will take a look in the evening (hopefully).
Do you have an airspeed sensor? If so ai would suspect it being covered during flight or wrong configuration of the sensor.
Hello
thanks for your response
for air speed , no i haven’t installed it yet.
Greeting
Foued
I would recommend installing it as soon as practical because it makes transition easier and safer.
Have you configured transition parameters?
2 Likes
Hello and thanks for your answer,
unfortunately using airspeed caused me a lot of problems especially with the firmware version 4.3.x, so I prefer not to use it until i get a high performance one, but my problem remains the same, and I would like to know the answer to why there is such a huge gap between the CTUN.AS and GPS.Spd, epecially the plane has reached 40m/s but the controller didn’t capture that speed since CTUN.AS stayed low and the plane entered Q_fail_act and started landing after exceeding the time limit (20 seconds).
I really need at least some guidance on why this is happening, as this project is time sensitive and I would like to test my vtol again ASAP.
Thank You ALL.
1 Like
Like @LupusTheCanine said , I would highly recommend installing airspeed sensor for this big aircraft.
Get this :
https://www.mateksys.com/?portfolio=aspd-dlvr
I use it personally for my all the aircrafts, quite accurate.
Q_ transition becomes much smoother when your AP has idea of ALT airspeed for transition and Q_ASSIST helps to maintain aircraft stability when you switch to FBWA.
1 Like
Hello
Thanks alot Idiota_Keen for your advice
Yes the next step is to install an airspeed in my aircraft with a long pitot tube.
however teh actual behavior of the aircraft is very stable during takeoff, transition, flying and landing.
Thanks a lot to all the Ardupilot teams really Great job.
Greeting
Try to keep airspeed tubing length under 15cm.
As it’s CAN bus , you can extend its wire length.
1 Like
Ok i’ll take in consideration your advice thanks.
1 Like
Hi all
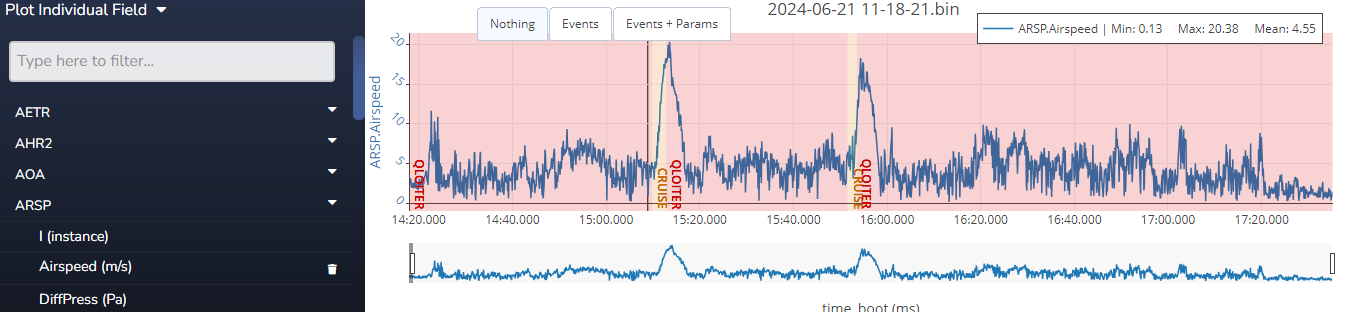
I alerady integrated the MS4525 airspeed in my VTOL (this is what i have now ), tested the plane and got these values as a result. I would like to know if it is reliable to activate the use of such an airspeed in a big plane.
Greetings
It is hard to tell without any meaningful flight time in FW modes and GPS speed as a reference.
Probe has to be shielded from wind during boot unless you have disabled automatic calibration during boot.
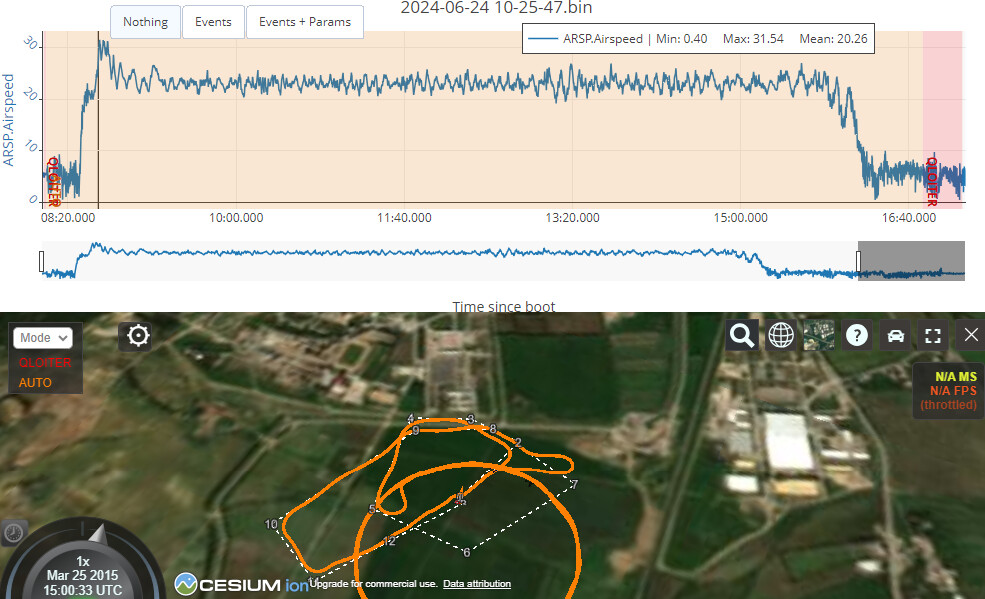
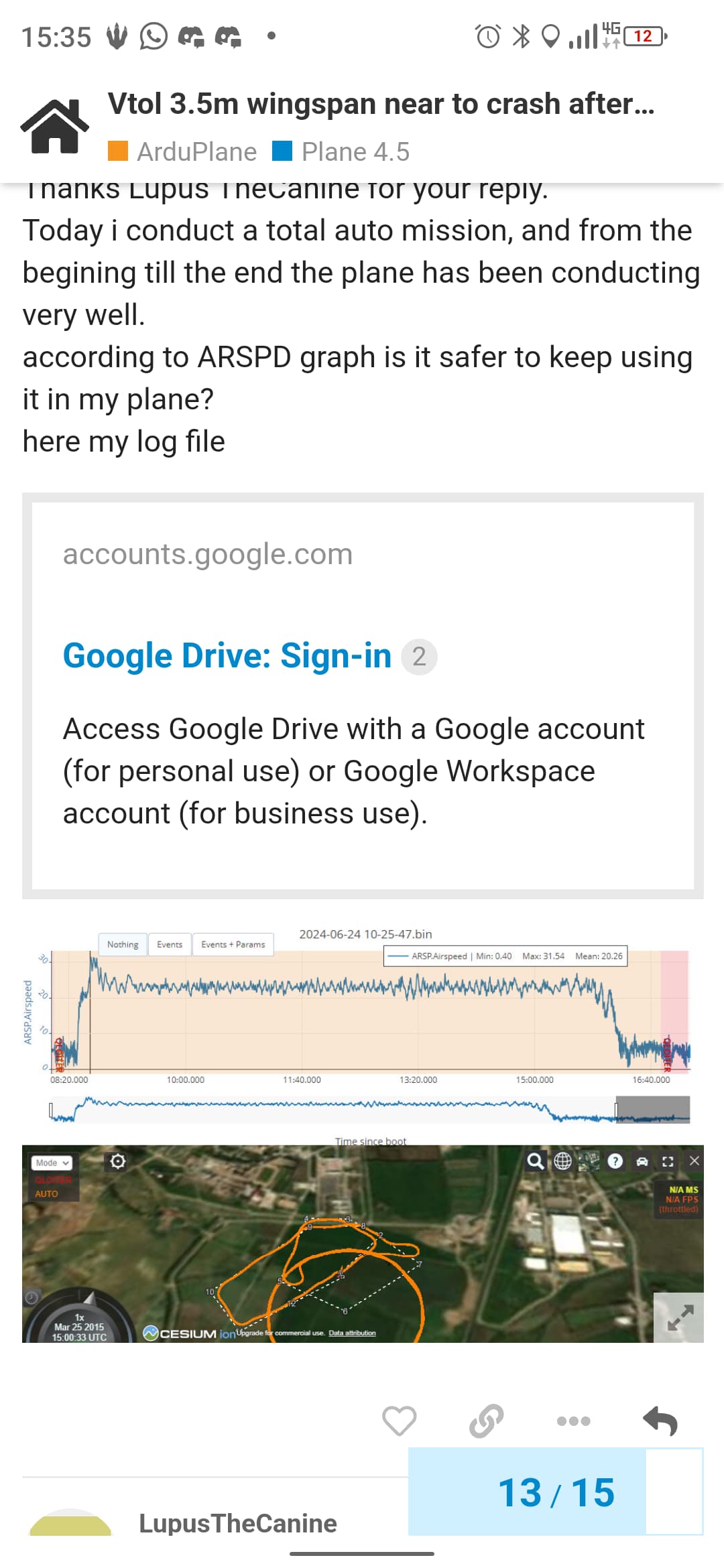
Thanks Lupus TheCanine for your reply.
Today i conduct a total auto mission, and from the begining till the end the plane has been conducting very well.
according to ARSPD graph is it safer to keep using it in my plane?
here my log file
The log requires sign-in
Doesn’t look too bad but I can’t tell without having ground speed to compare against.
It looks a bit like the offset was’t calibrated correctly.
Remember to keep the pitot static probe shielded during boot unless you disable auto calibration on boot.
Do you have static port on the probe or inside fuselage?
hello Lupus and thanks for your advices.
The log is open for all.
For static port is on the probe, and during boot i covered the pitot tube so that the calibration will be done correctly.
Greeting
i’m sorry here is the link