Doing SITL and found an example with RealFlight for physics and viz. Costs 100$. Any free alternative out there? Visualization capability preferred.
No the ceilings are not thrust limited, for the rotorcraft on which I have calculated performance, it is always engine limited. For turboshaft engines, it is either an compressor speed limit or an exhaust temperature limit.
Hover ceiling is generally the altitude that you can hover at with 100 fpm climb rate available. There is no consideration of T/W for this. Typically helicopters may be looked at from a power to weight ratio.
Best info I found from a couple of websites was 14,000 ft hover ceiling but they didn’t give any weight associated with it. The referred weight is calculated by dividing the density ratio into the weight at that condition. Thus it would be the equivalent weight at sea level. if we assume the weight for this was 52,600 (which I doubt it was). The density ratio at 14000 ft is 0.65. Which gives you 80,768. So effectively 1/density ratio in this case is your T/W which is 1.54. I would guess that in most cases the T/W for a manned rotorcraft at max t/o weight is less than 2
Really?? You are a software developer and you can’t spend $100 on Realflight?
1 Like
nice
haha, i was going to buy it if no one answers in 30 min. i dont like to waste money if it can be helped ![]() and i have no other use case for it right now, but for this demo. probably will be useful though in the future. but i literally just found out what realflight was. lunch today was more than 100$
and i have no other use case for it right now, but for this demo. probably will be useful though in the future. but i literally just found out what realflight was. lunch today was more than 100$ ![]() funny how that works
funny how that works
Well stick around and contribute. You will find plenty of use for it then. Just don’t be so arrogant.
yessiree. certain people just rubbed me the wrong way. but it wont be happening anymore. everyone else is awesome here though ![]()
1 Like
https://ardupilot.org/dev/docs/sitl-with-jsbsim.html
Have a look at FGFS.
It is used for visualisation in the Ardupilot project.
Then if you feel to dig into JSBSim you can create your own dynamic model.
There should be options to add bindings so you can generate runtime alterations like motor failures, loss of thrust etc.
You could then script all that for the tests scenarios.
To me this is the most versatile option, although I am not very up to date on this subject.
@JeanPhilippeHell thanks, but ill stick with realflight for now because it seems easier.
having issues running barebones basic SITL. I cant find any logs that would clue me in to whats wrong.
After choosing Multirotor:

Using this Mission:

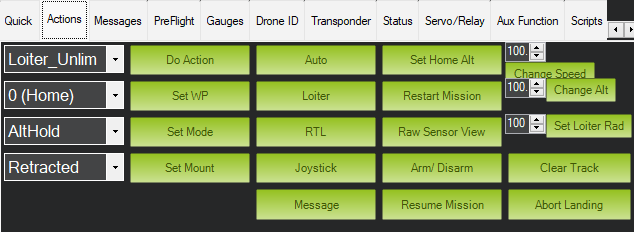
And this Actions menu:
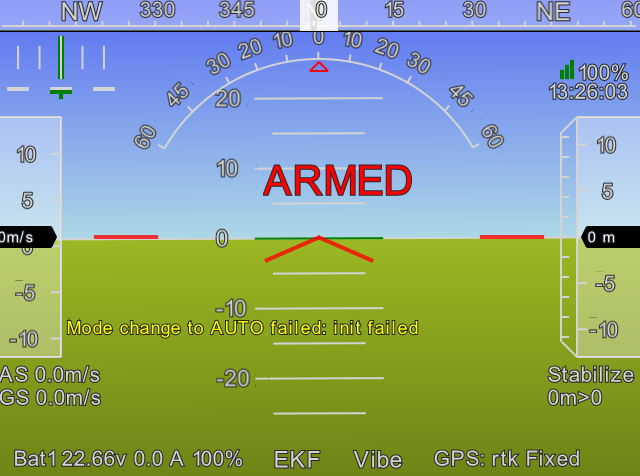
I hit Arm then Auto and I get this:
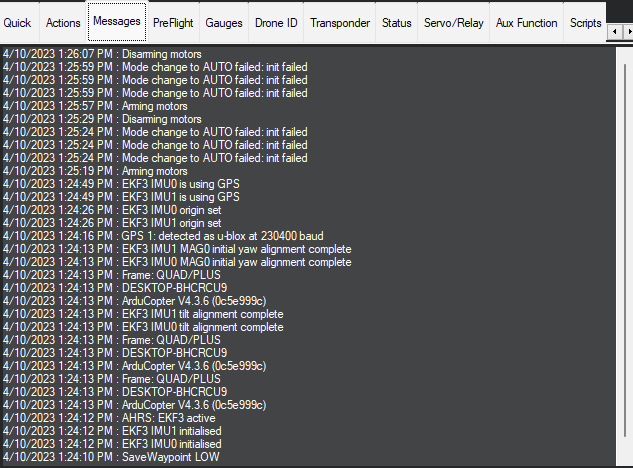
These are messages:
You may want to create a topic about that.
I didn’t use much SITL, but IIRC the elf creates .bin logs at the path where you run it.
If you use MAVProxy it creates telemetry logs too, but they are not as verbose than ardupilot’s elf.
Implementation of Auto Mode init returns false only under 2 conditions, which i dont think i am doing either of:
- first mission cmd isnt takeoff (delay is skipped in the impl)
- number of mission commands <= 1
Yeah I ran a quick SITL with ./sim_vehicle.py -v ArduCopter -N -L KSFO --console --map --out 127.0.0.1:14550 (having previously compiled with ./waf configure --board=sitl && ./waf copter -j5)
And the logs are created under the “logs” directory where you run the script.
I didn’t manage to take off with right-click “fly here” via MAVPRoxy, but the mission loaded through QGC run fine via QGC.
How does your mission looks like ?
i posted above, repeated here:
i also deleted delay just to see and it still failed
real simple, just takeoff then land
also i didnt explicit set copter params, so i assume its just using default

Maybe it needs a waypoint ?
didnt work. however, the right-click options work. “Take Off”, then “Fly To Here”. If I fly to a point behind the copter, it does a rather aggressive 180, and I could probably test my change that way. Now to find a way to command max yaw and change the weight of the craft…
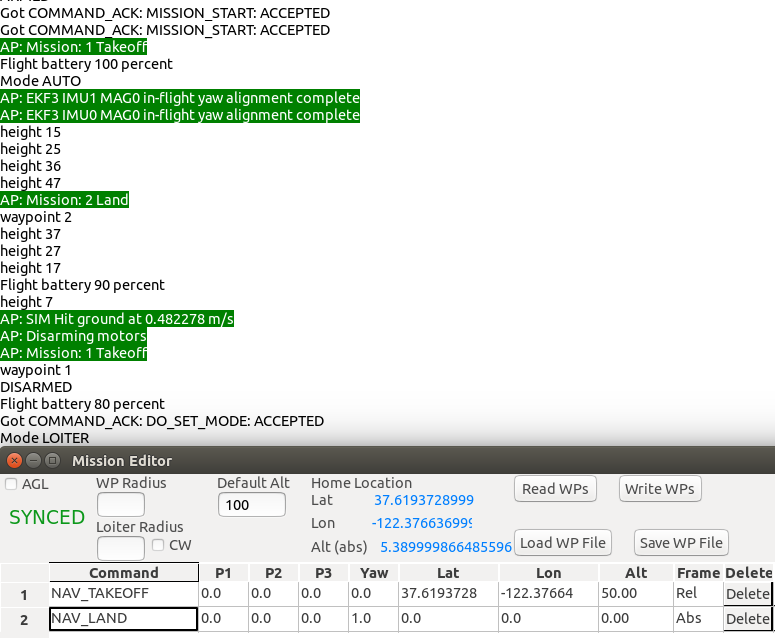
Ok, on my side I managed to run the same mission as you programmed via Mission Planner but then to execute it I had to use qgroundcontrol’s menu :
When I start the mission via MAVProxy arm throttle (in stablize mode) then auto it seem to start the mission but it does not takeoff an then disarm immediately instead of climbing to the toakeoff alt and then executing land.
You have some options here :
https://ardupilot.org/dev/docs/copter-sitl-mavproxy-tutorial.html#guiding-the-vehicle
setyaw ANGLE ANGULAR_SPEED MODE (MODE is 0 for "absolute" or 1 for "relative"), or even sending an RC command should give a repeatable way to test your changes.
https://ardupilot.org/mavproxy/docs/uav_configuration/system.html#rc
I didn’t have success tonight with the auto or guided commands in MAVProxy, I have these errors :
Got MISSION_ACK: TYPE_MISSION: ERROR.
You could also reduce the motor setpoint being sent to realfight if messing with the physical model is complicated / impossible.
Good luck !
Stupid question but sometimes overlooked. Did you write the mission to the aircraft?
1 Like
Bingo! that was it. Thanks! I havent done auto missions in 1.5 years, so that did not cross my mind (also in SITL i am writing to a virtual aircraft).
1 Like