If you remember them, it would be helpful to list some of them. it could save everyone time by reducing review iterations. but i fully expect to have the pr out today.
the requested yaw pics:

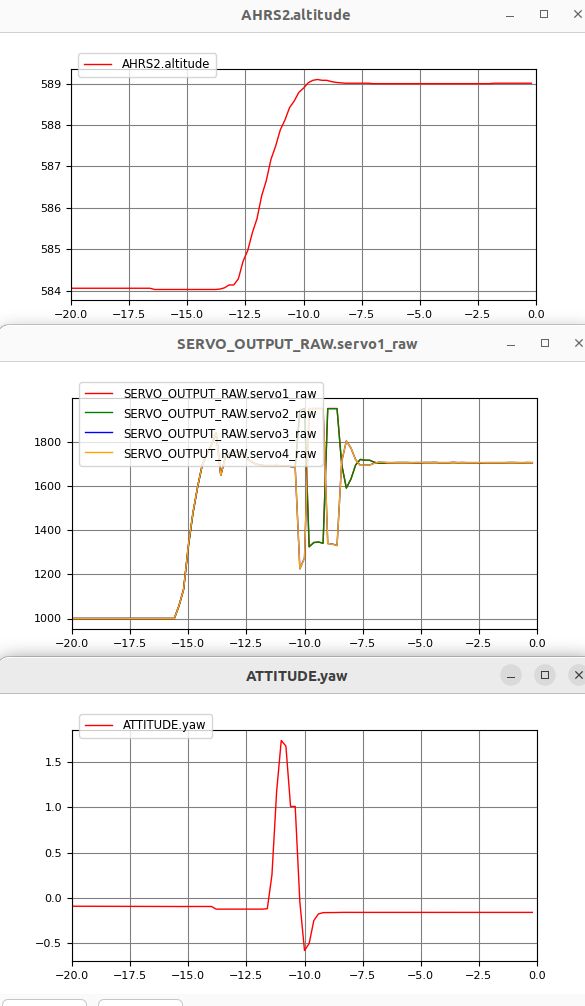
the yaw looks like its not very accurate in either case, due to output saturation, so not sure if its helpful. then again, the CONDITION_YAW command has been documented to behave non-intuitively, (quick search for the command on the forums will show that if youre interested) and it still has open issues on fixing its expected behavior (not sure if relevant to this case).
I didn’t expect to, but I ended up being able to do approach 3 (dynamic minimum throttle), instead of introducing a new user-configurable parameter.
1 Like