I`ve encountered a problem with the implementation of the VOLZ Protocol over 2 different UART ports. In my case I need to send the VOLZ protocol on 2 different UART ports in order to get redundancy of the system because the connection between the servos and the autopilot is over RS485. This means that all of the VOLZ Servos signals come over one lane into one UART port, and I want to have 2 lanes that come to 2 different UART Ports at the same time. The issue is that at this point when I set the 2 different UART ports to use the VOLZ protocol I get signal only on 1 of the 2 UART ports and there is no signal at the other. I have also noticed that the UART port which gets the signal is the one having the lower numerical value set in Arduplane. So can this be fixed so that I can use more than one UART port at the same time using the VOLZ protocol similar to the way I can setup GPS or Telemetry to communicate on more than one port.
I’m struggling to understand your use case, maybe you can explain in more detail? You want to connect to the same servos twice with different UARTs? This is not the same as GPS or Telemetry, you only ever connect to one device to one serial port.
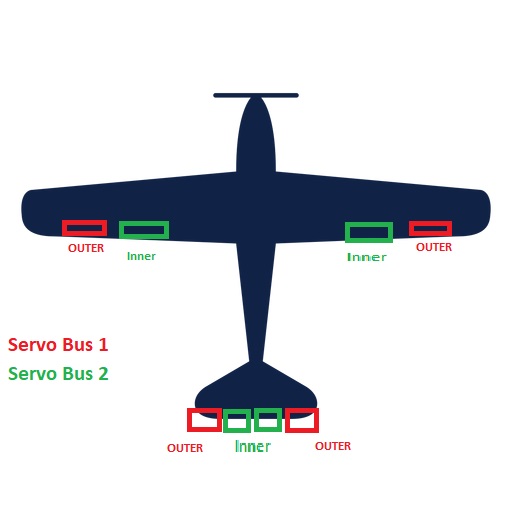
I need to send the Volz Protocol on 2 different UART ports at the same time to supply the Servo Bus 1 and the Servo Bus 2. This is needed in order to create redundancy for the RS485 servo line.
Confirmed!
However, the redundancy is a bit compromised that way.
This is the reason I am looking for some gentle solution from the firmware side if it`s possible ?