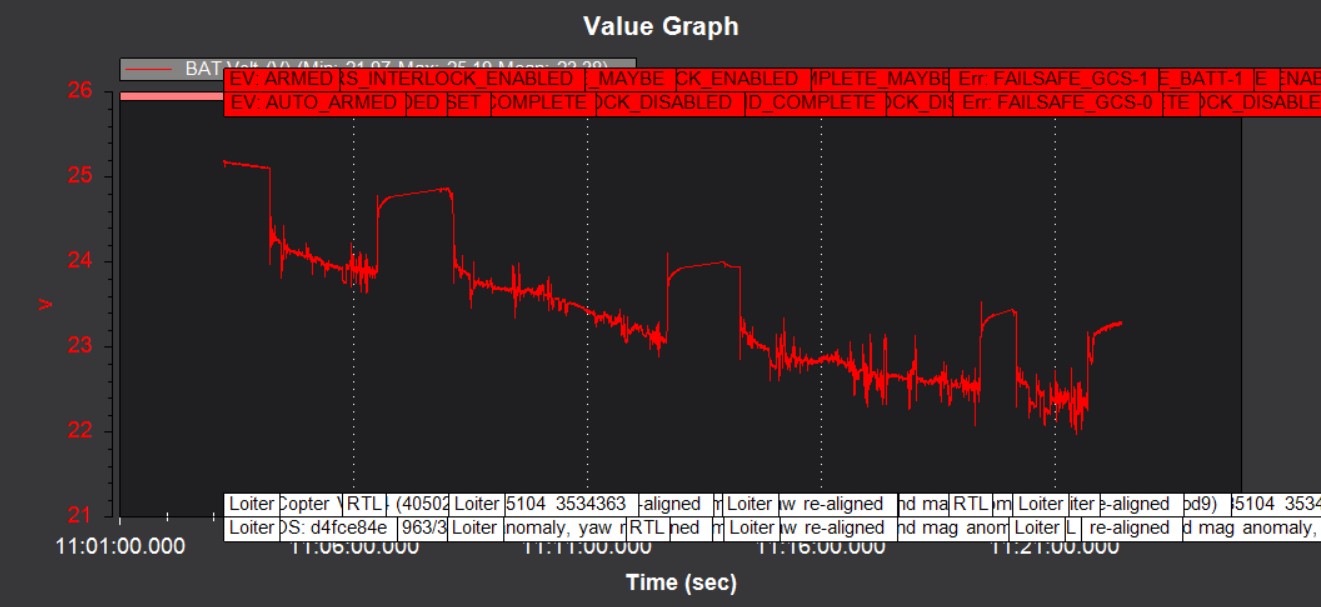
Hi all, I just finished up a build and first flight of a large octocopter, and noticed a voltage drop of about 1 volt when the drone lifted off and was in the air. There’s a log from the flight below, and you can see it starts at ~25.2 volts and drops to 24.3 as it flies, slowly drops more from there as it drains, and then goes back up to 24.8 volts on the ground. This happens each time the drone goes up and leads to the low battery failsafe being triggered before the battery actually reaches that voltage. This is a pretty big drone using T-motor MN5008 KV400 motors, T-motor 16*5.4 inch props, BLHeli 32 ESCs, mRo control zero F7 FC, and running on two brand new paralleled 6S - 10000 mAh - 25C Tatuu Plus LiPo’s. During this flight, the drone weighed about 12-15 lbs, but will later be carrying a payload to make the all-up weight around 25 lbs. The wiring from the batteries to the PDB is 8 and 10 awg wire with XT150 connectors, and the power module measuring the voltage is powered from the PDB. Since the power module isn’t measuring current draw from the motors, I estimated the max current draw for the flight to be about 60 amps based on T-motor’s data, which shouldn’t be a problem for the wires or batteries. Anybody got any ideas as to why I might be seeing that voltage drop? I think moving the power module upstream of the PDB may help, but I want to be a little more sure before I try. Any kind of help or suggestions woukd be very much appreciated, thank you!
There is a lot of smart people here that probably have more input then I can provide but I can tell you from my own experience that the voltage does sag as the demands of the copter are put on it. I was having endless Battery related failsafes until I discovered you can change the way Arducopter looks at voltage for it’s failsafe functions.
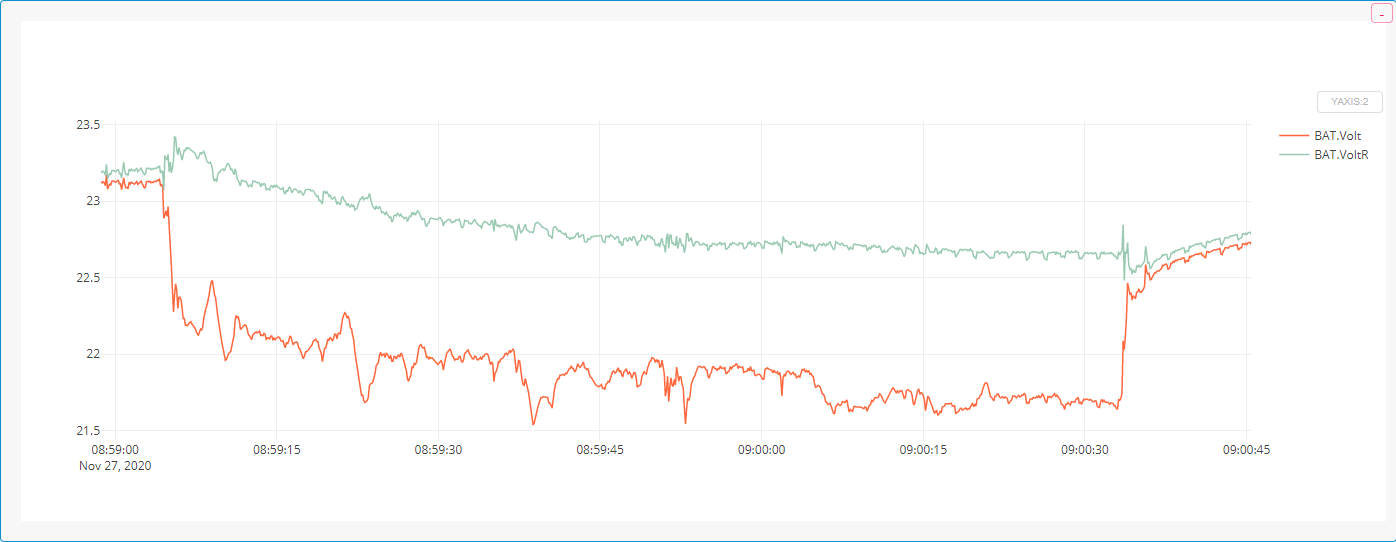
The parameter seen here tells Arducopter to use the sag compensated voltage for failsafe.
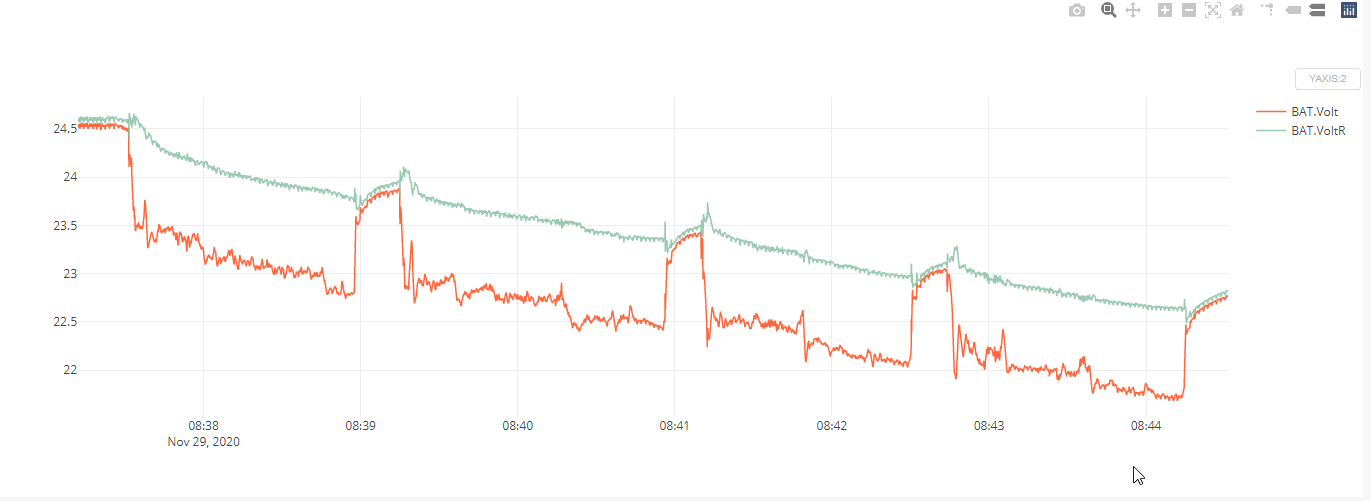
Here is an example of a flight today and the difference between the two voltage measurements.
As you can see the Green line is very different from the voltage in red that is not sag compensated.
This assumes you have an accurate voltage measurements taking place.
I second what Shawn said about the Current sensor.
It will give yo an RTL just as fast as a wrong voltage measurement. I learned all this the hard way lol.
Oh and if you think it’s simply throw on a meter and check the voltage and current…sorry…it can take several adjustments and testing to get it correct.
Thanks for the suggestion Ricky, I tried using the sag adjusted voltage but that didn’t seem to work. The log from the flight I just did shows that the adjusted voltage pretty much exactly followed the raw voltage reading. This thread: https://discuss.ardupilot.org/t/batt-fs-voltsrc-how-is-sag-compensated-voltage-calculated/42620 says that the sag calculation is done based on the changing current draw, but that won’t work since my power module isn’t measuring draw from the motors. Fully loaded, the burst draw could up to 225 Amps and I wasn’t able to find a power module with that capacity Seems like sag is inevitable so I may just settle for setting the failsafe voltage lower.
Well I confess I am puzzled by that. My machines all have a single voltage measuring device at the power module. They don’t measure the voltage per motor or voltage specifically drawn by the motors.
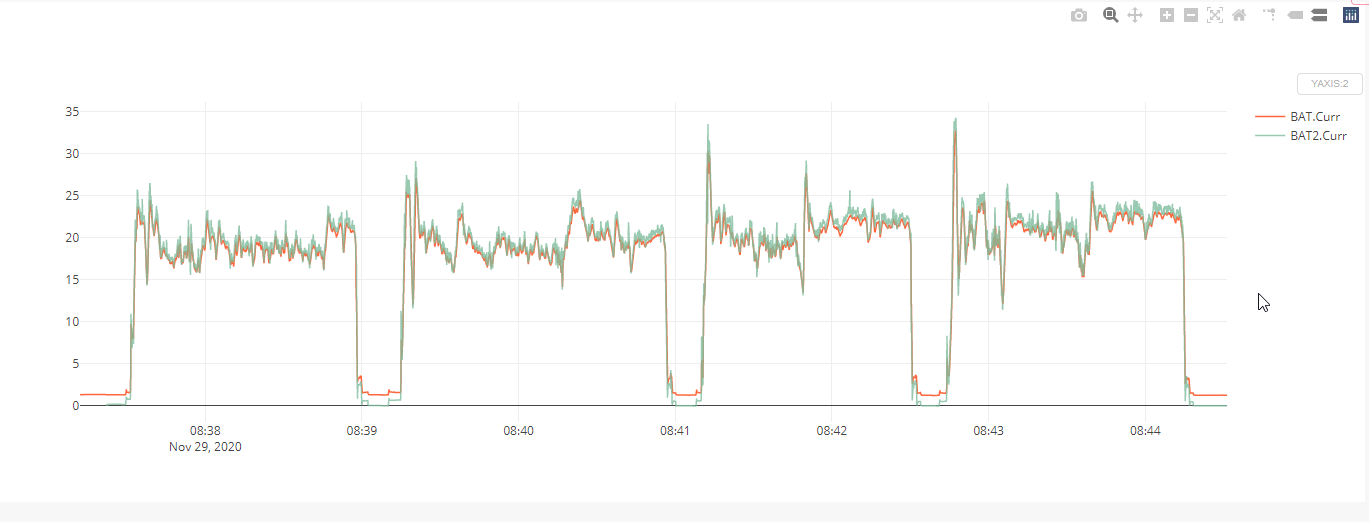
I can measure that easy enough with ESC telemetry.
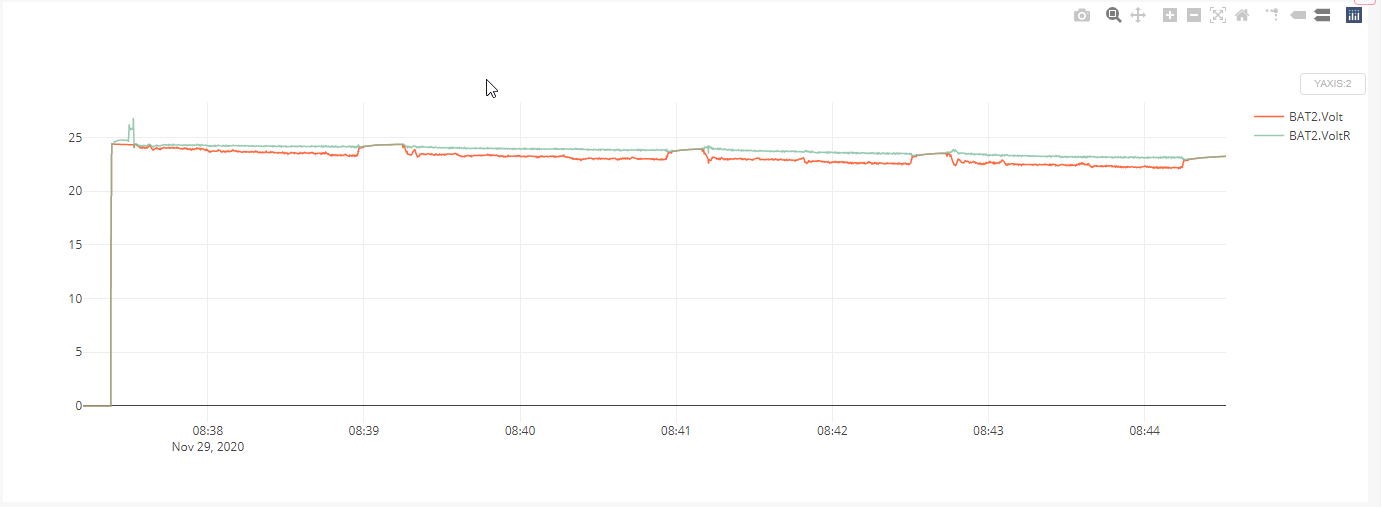
This is Bat1 voltage versus sag compensated
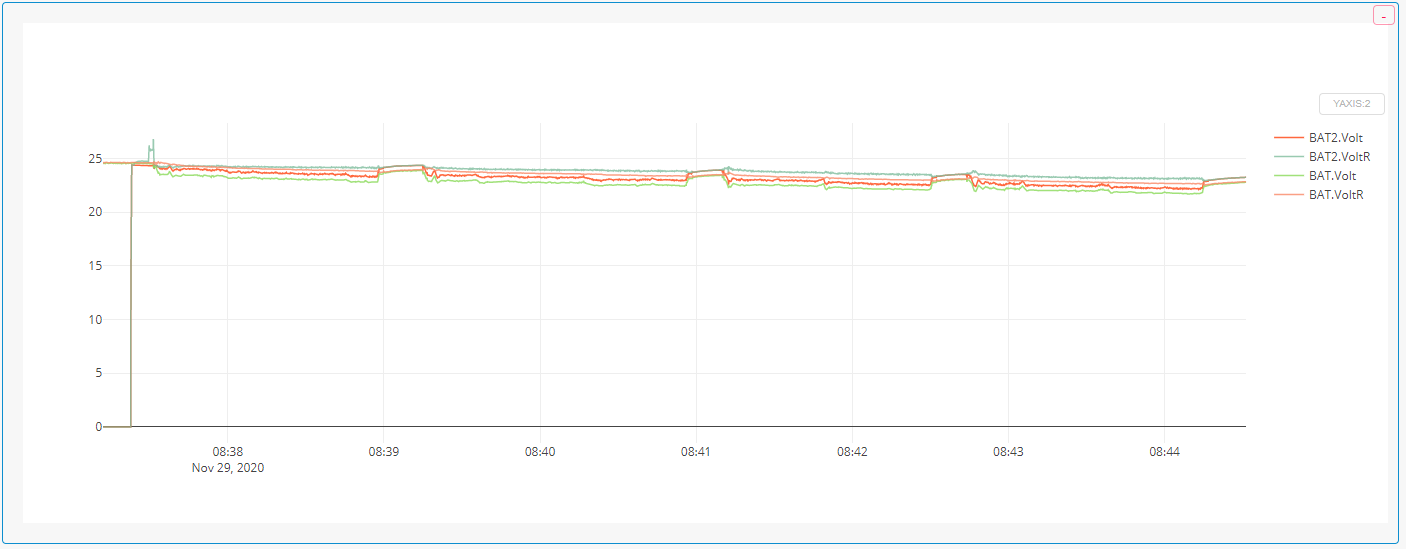
None of my machines produce a graph like the one you display…Thats odd…but like I said there are a lot smarter people then me on this forum perhaps they have some thoughts.
 Seems like sag is inevitable so I may just settle for setting the failsafe voltage lower.
Seems like sag is inevitable so I may just settle for setting the failsafe voltage lower.