Hi everyone:
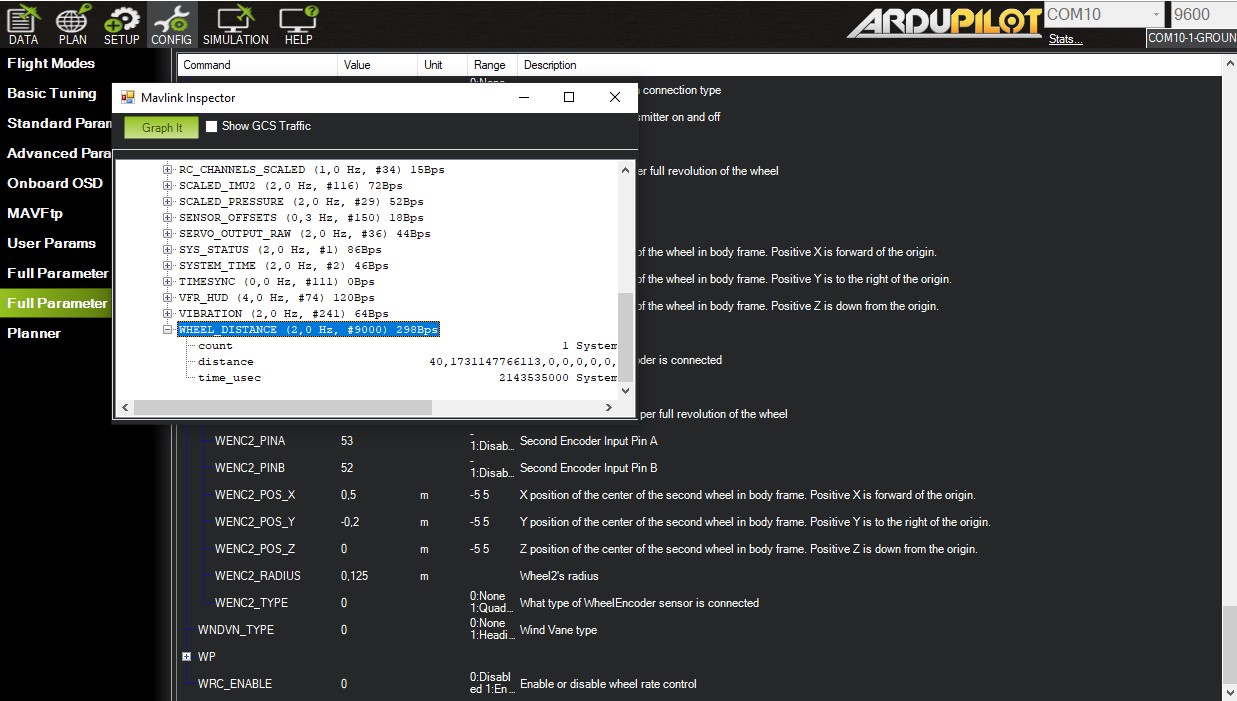
I am new to this and forgive my bad writing, English is not my native language, I come in search of your knowledge and help, I am currently building a rover with hoverboard wheels and without GPS, instead I am using the encoders integrated in the wheels , My hardware is the classic pixhawk 2.4.8 with rover 4.1.0, following the documentation on Wheel Encoders, I managed to make at least one encoder work for the moment, displaying the variable “WHEEL DISTANCE”
but now I want to know if there is a way to display that variable outside the MAVLink Inspector or at least that is stored in the log after each mission, I look forward to any help
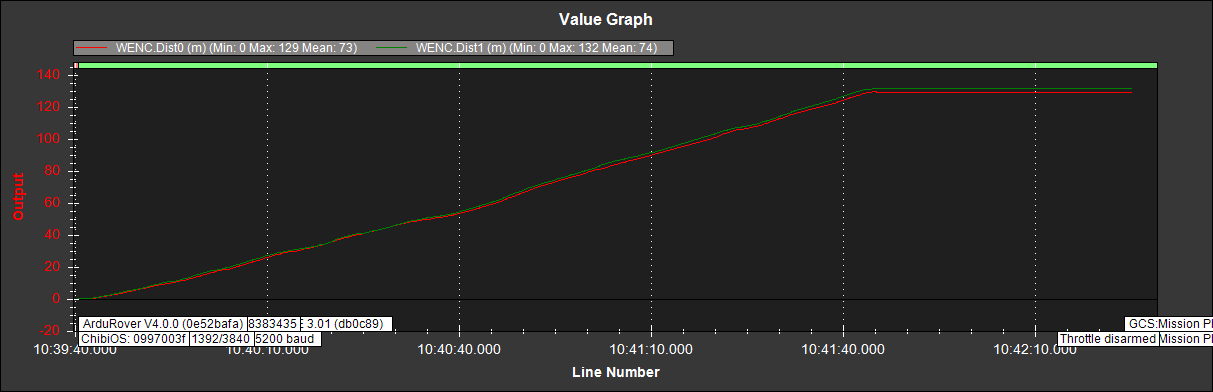
What a good idea, I did not think about graphing the variable, it is not very elegant but it works, in my last attempt, I managed to graph the distance to be able to associate the ground speed with the wheel encoders, but I still have the problem of not being able to do that the distance is saved somewhere to later check it, I check the logs but apparently it is not saved there
hello, i have installed a wheel encoder for distance measurement on my rover with orange cube. it works because I have the feedback in Mavlink which gives me good info.
Unfortunately, I don’t know how to display the distance measurement in Mission Planner, I want to display the distance in on my radio control with QGC or SOLEX from HERELINK. is this possible and if so how? help please I am stuck on this last step. thank you very much.
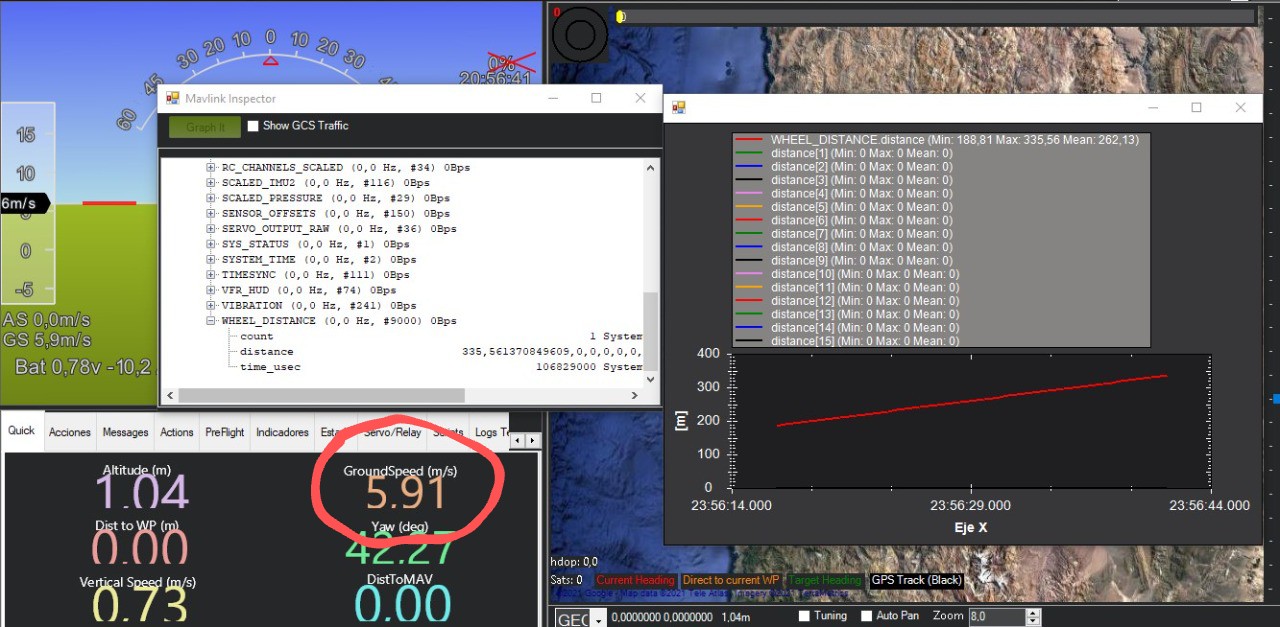
hello, the only way i could find to display the distance in my case, in mission planner or in QGC is to start the rover outside and wait for it to pick up more than 8 stallites with the GPS (which I added because I didn’t have one originally) and then to choose on the right map of mission planner “set home here” and “set EKF origine here”. then in the “quick” mission planner choose “distance to home” and “ground speed”. you can then drive inside without GPS, the distance is then displayed. to reset the distance “disarm” and “arm” again, the counter restarts at zero.
I specify that I needed to display the distance only, no autopilot. I pilot the rover manually.
if it can help…
Seba_M, did you have to do any scaling or amplification of the hoverboard encoder signal? Or did you plug directliy into Pixhawk’s AUX OUT 3,4,5 and 6 as described here: https://ardupilot.org/rover/docs/wheel-encoder.html