As can be seen on the trajectory followed indoors by a Rover Balance Bot, as captured from the .tlog file (purple trace) on this video, it slowly shifts.
GPS coordinates are relative to the EKF origin calculated from the wheel encoders signals, so they are virtual.
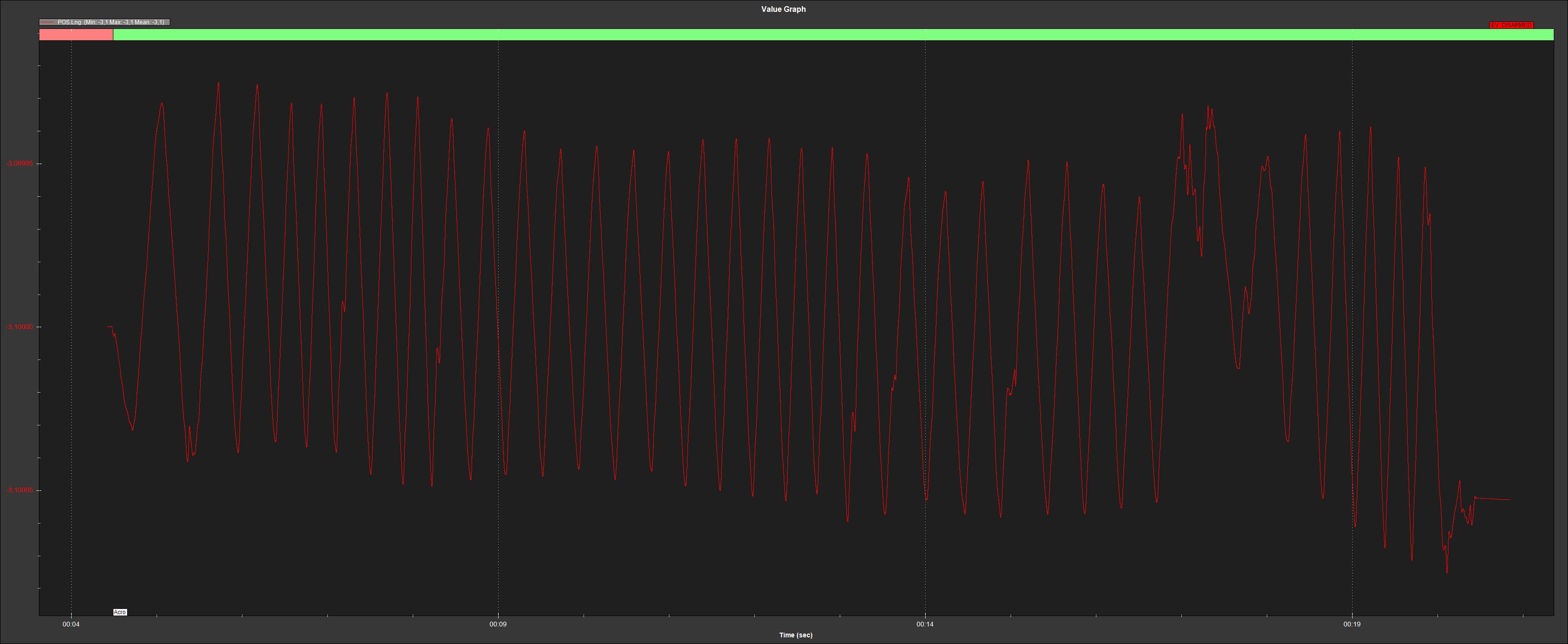
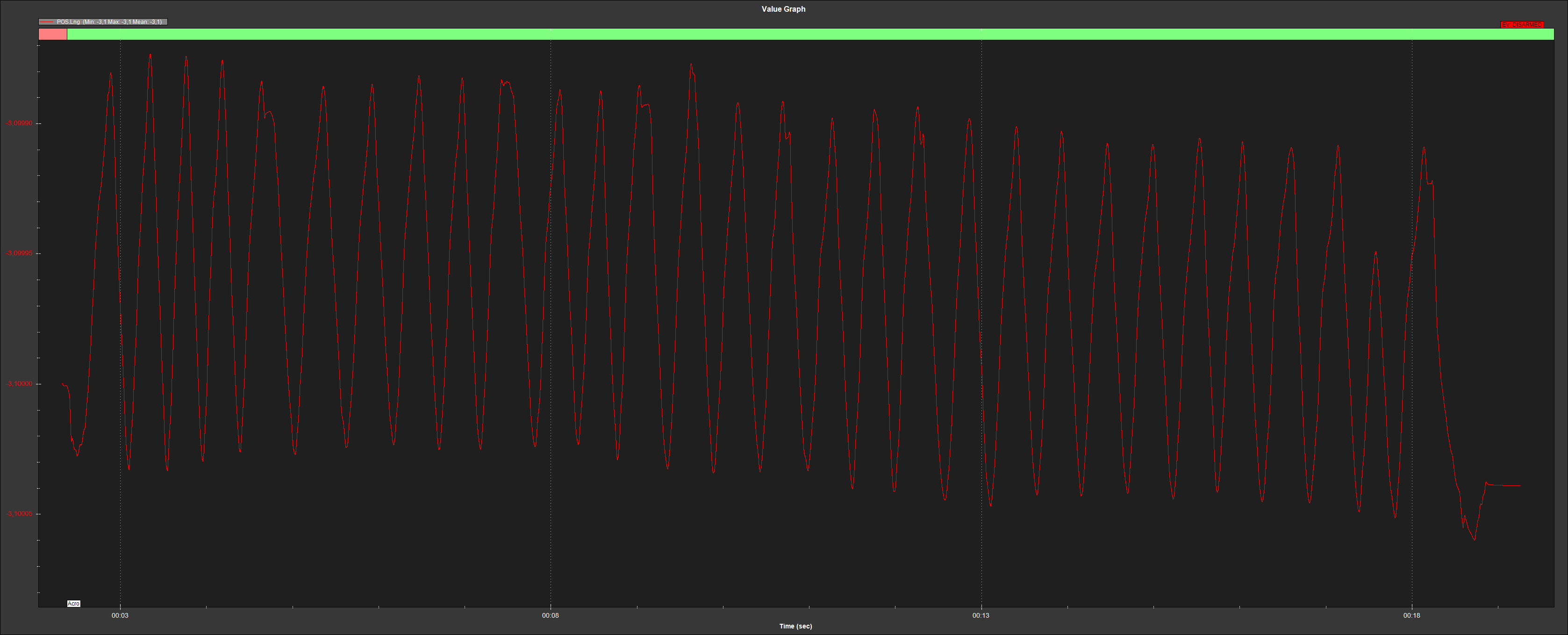
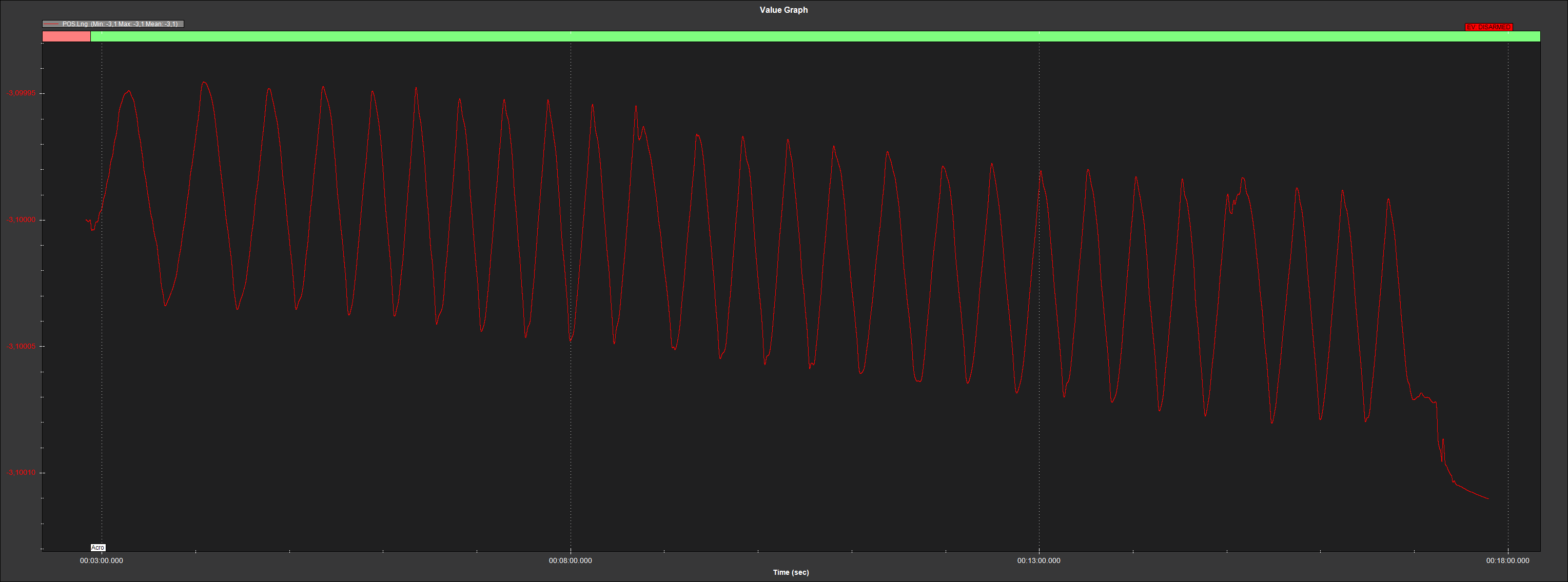
One would think that it may be due to the wheels slipping, but the shift is only for POS.Lng:
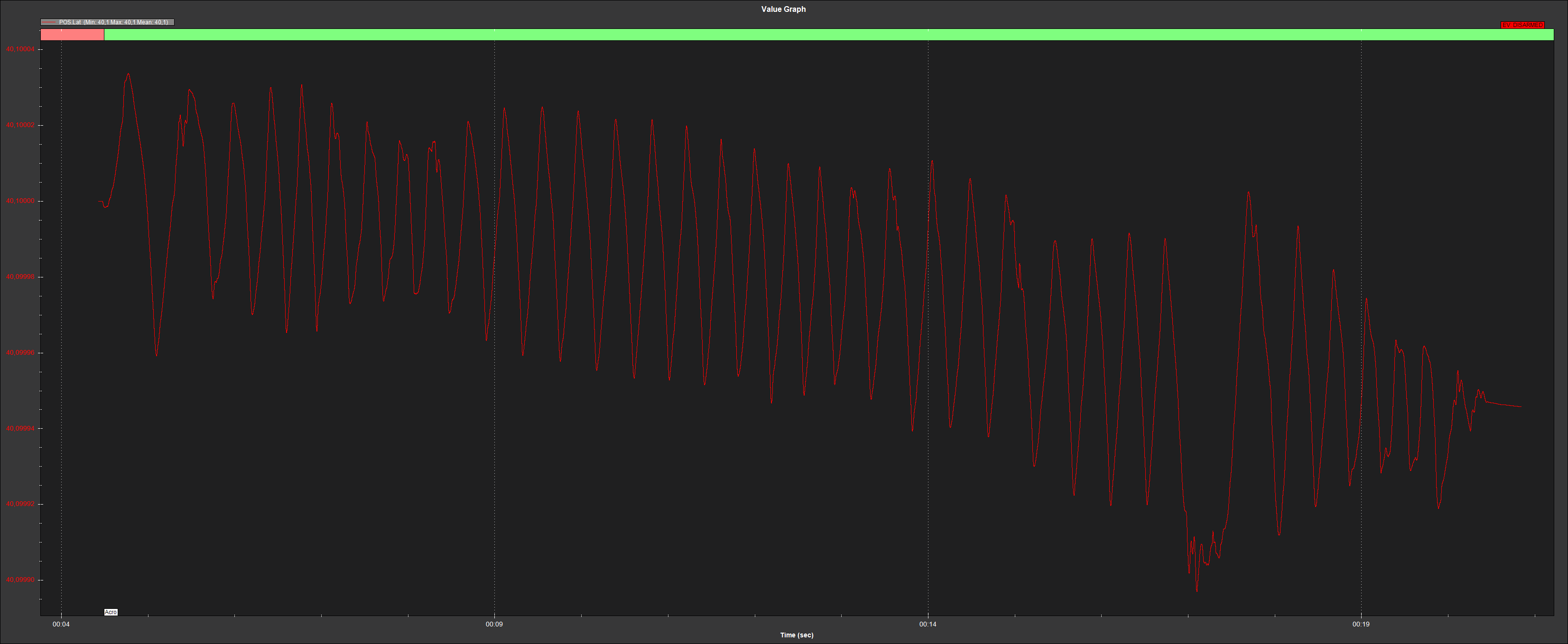
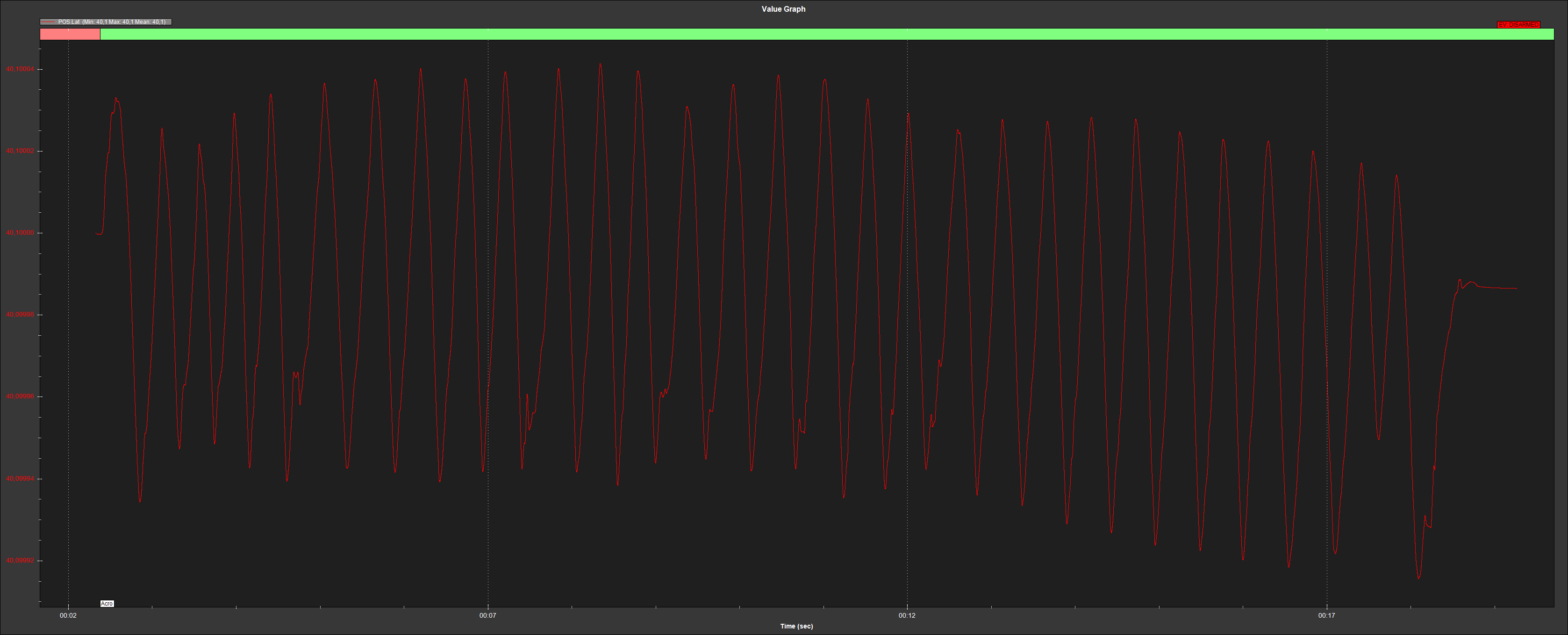
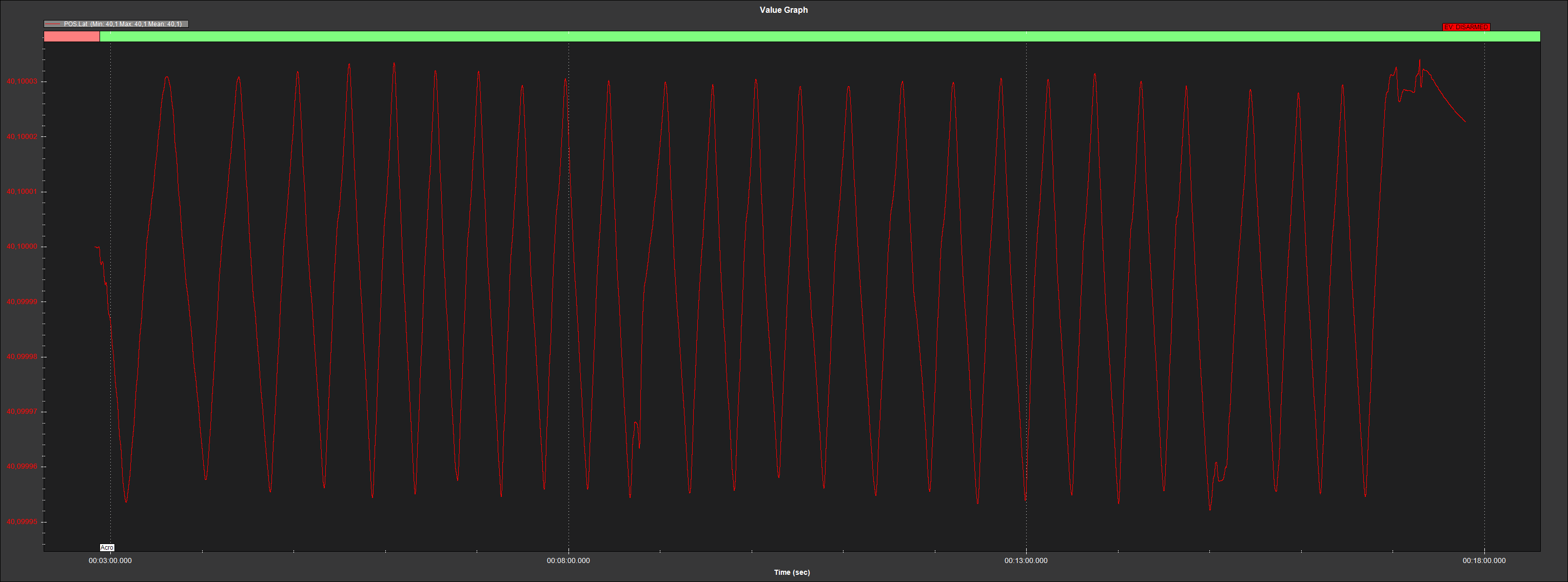
while POS.Lat has no shift:
Can there be somewhere a small arithmetic error accumulating?
The wheels reported distances seem correct:
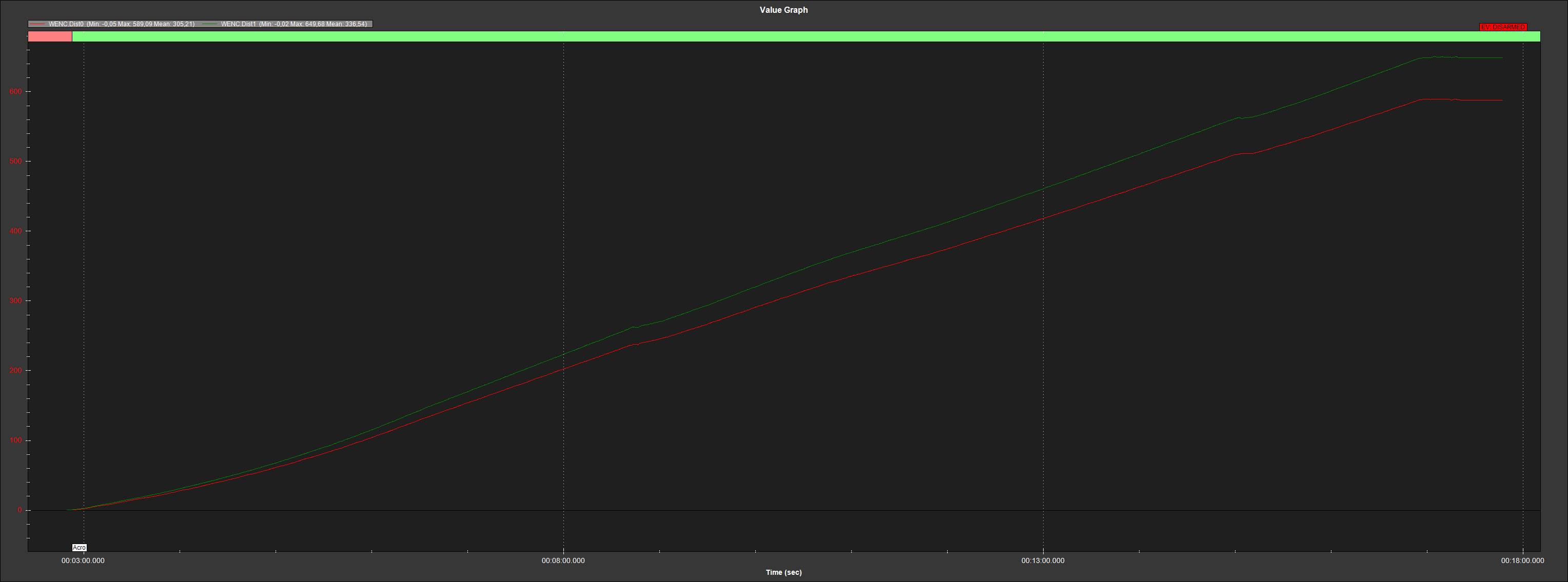
with the difference between the outer and inner wheel possibly good.
Also, the OSD GPS coordinates are 0:
but they change on the hud (I copied the OSD parameters from a working configuration).
MP 1.3.81 build 1.3.8898.43120.