• Flashed most current Rover version
• Calibrated Accel and Compass (Offset XYZ for GPS position to flight controller)
• Calibrated Radio
• Set ROLL to 1 and THROTTLE TO 2 (Single Stick)
• Set Aux switch 7 (3 Position) for CRUISE LEARNING
• Set Aux switch 9 to (arm/disarm)
• Bench tested for correct directions of control sticks. Forward/Back Side to Side (Had to reverse throttle)
• In MANUAL applied throttle. 25% of center.
• Flicked Aux 7
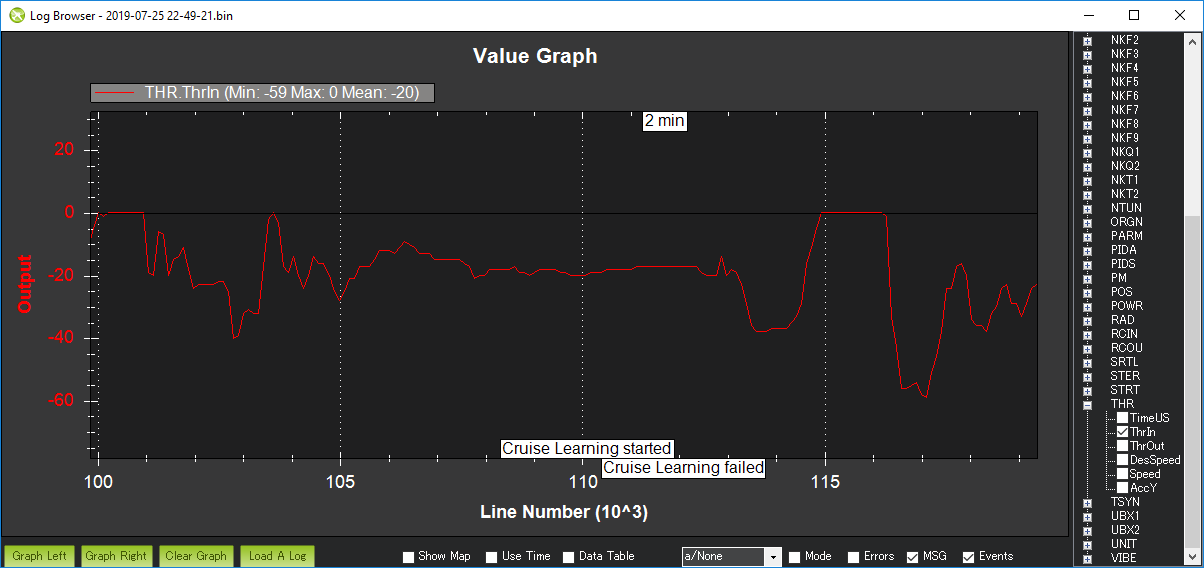
• Message: CRUISE LEARNING STARTED (3 seconds) then CRUISE LEARNING FAILED.
• PLATFORM: Turnigy Trooper. (This is a fast truck)
Ok. I unclicked all REVERSE boxes for input and output. I switched two wires on the ESC and everything was running in the right direction. I trying CRUISE LEARNING and failed again. Looked at the logs and the throttle is still in the negative.
Well, somehow you’ve got to get the throttle to be positive when the throttle stick is up/forward. If you haven’t tried using the motor direction screen in MP I highly recommend it.
If you’re using the MP Quick screen can be configured (by double clicking on it) to display “ch3percent” which is the throttle output.
Any idea why the “pid achieved” does not change (when the pid desired seems to be working just fine) during the speed to throttle tuning. I’m doing the tuning in “Acro” mode.