Due to the availability of 4G, I am slowly moving towards connecting video and data over 4G connections.
But I noticed MP crashes very easily. A few of the symptoms are:
A video stream with low bit rate and low FPS
It seems like MP only wants standard video 20 fps or more) with high bitrates
A short interruption in video or data
It looks like once MP is connected, it becomes very sensitive to short breaks, either in video or data. With the use of 4G modems, there is always a possibility of having a short interruption.
Are these known issues or can it be cured by changing settings?
I noticed that QGC doesn’t have these issues. However I am used to MP and don’t want to change.
A crash of MP, when you are flying a bit further away and having to restart and reconnect, can of course be fatal for the vehicle.
Pixhawk 2.1
Raspberry Pi 3, b+ running Raspbian and Picam
Uavcast-Pro from Uavmatrix.com
4G modem
Mission Planner (latest version)
WiFi or 4G modem Internet access
I use VPN Zerotier to connect mission planner with the vehicle.
Uavcast give me a lot of flexibility to use UDP or TCP to connect. Normally I follow the default settings. UDP port 14550 for data, UDP port 5600 for video.
If you want, we can setup a test connection. Since using the Internet it doesn’t matter where on earth we are. You can be in Australia and I can be here at my home.
By the way, I think the crashes are caused by latency as well.
Hi @Michael_Oborne
As @Verloop said, MP crashes very often when using video in HUD.
Pipeline used on Raspberry Pi: raspivid -n -w 1280 -h 720 -b 1000000 -fps 15 -t 0 -o - | gst-launch-1.0 --gst-debug-level=0 -v fdsrc ! h264parse ! rtph264pay config-interval=10 pt=96 ! udpsink host="gcs_ip" port=5600
I will do some testing on MP later today and provide you logfiles and wireshark logs as requested.
If there is any specific files from MP you want, then please let me know.
This works great, but if the stream is interrupted, after 10 seconds, MP closes without error.
I am running Windows 10 and can see the following in Event Viewer:
====================================
Application: MissionPlanner.exe
Framework Version: v4.0.30319
Description: The process was terminated due to an unhandled exception.
Exception Info: exception code c0000005, exception address 00000285C3BFFEEE
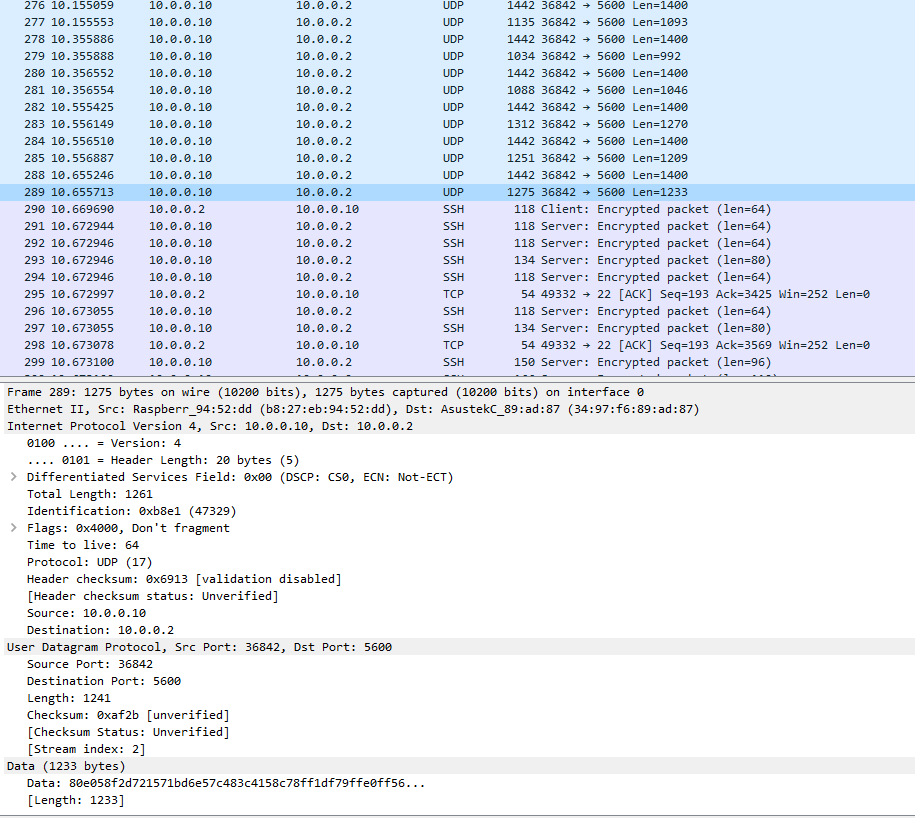
It doesn’t look like anything that special is happening when the video stream ends (which I am simulating by just ending the process on the Pi). Just the UDP packets stop coming in.
That works. If I kill the stream for 60 seconds, it reverts back to the standard HUD. If I then start up the stream again, it does not appear to switch back to the stream though. Is that possible?
I can definitely work with this as it is. Awesome!
Hi Michael. I done some extensive testing over the past few days and can confirm it is working as you mention.
Only 1 thing is a bit strange. As somebody already mentioned, if after a 60 seconds break the video comes back, it will not be displayed anymore.
I sometimes have to restart the vehicle and it takes certainly longer than 60 seconds before everything is up and running again.
However, this implies that I also have to restart Mission Planner.
Even worse, if I am in a mission, and there is an area without 4G coverage, signal and video will be gone for a while and if it is longer than 60 seconds, video will never come back.
That would mean I have to restart Mission Planner during flight…!