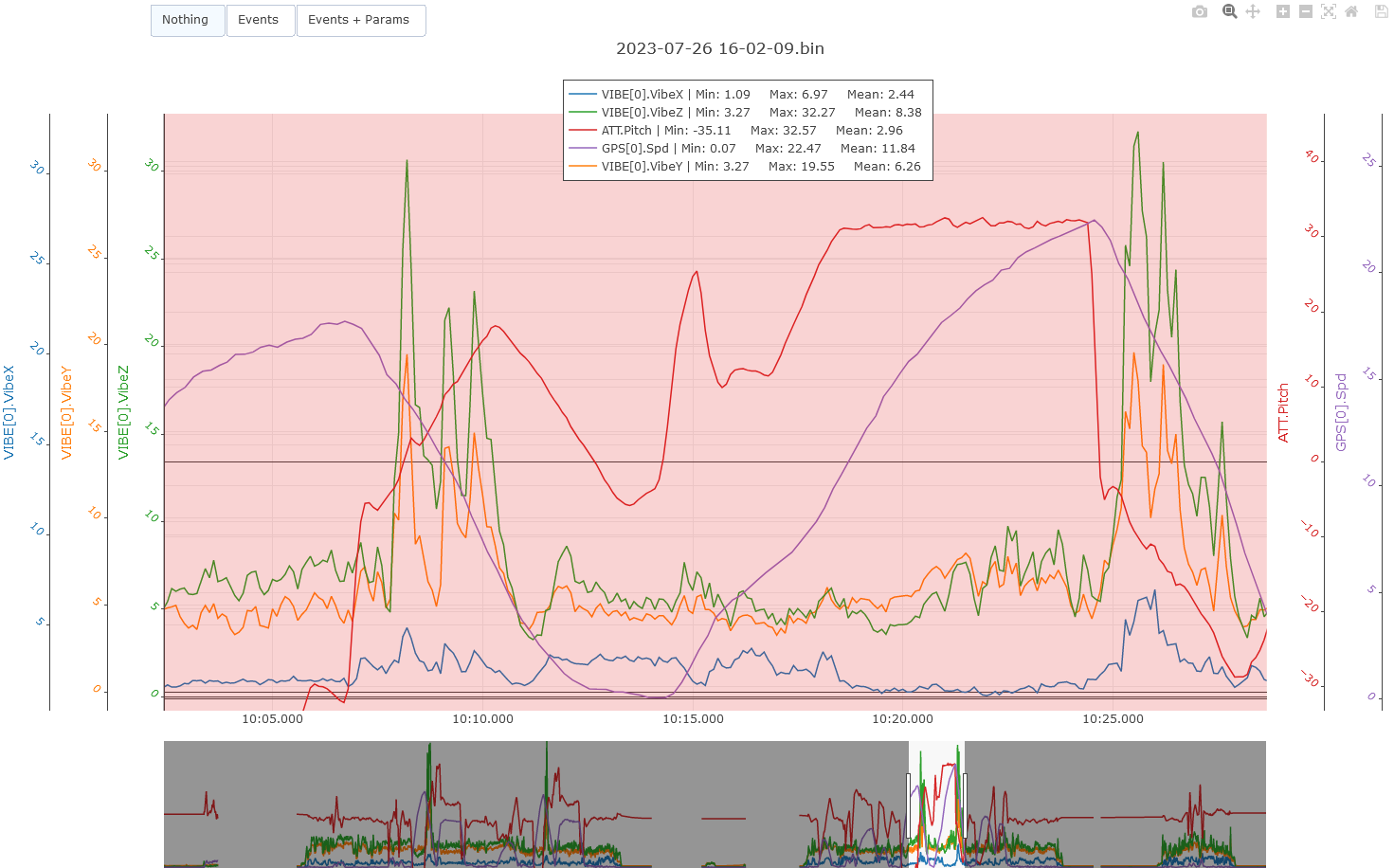
Hi Running a matek on a 10" prop quad. I’ve rebuilt the unit to reduce vibrations.It has worked very well. I just notice that during braking after a max speed run i do get vibrations higher than I had hoped (I’m trying to generate worst case scenario). The vibrations are quite good under low and 100% throttle. These peaks can only be reproduced by braking. The peaks are also only in Y and Z (not X).
Can I accept this?
I have the FC rubber mounted and I do have a 20g mass attached to the FC to reduce vibrations.
Would a re-tune make a difference? I did remove a 5% of weight and need to retune.
I’ve got notch filter setup.
Maybe one of the tuning experts could suggest an improvement but honestly it doesn’t look like an issue to me. The tune looks good just looking at the desired vs actual values. The Z vibrations are only during hard braking, so that suggests it’s aerodynamic. If the quad has 10" props I’m guessing you aren’t aggressive freestyle or maybe there’s a camera setup on it? So unless you plan on doing a lot of really hard stops or aggressive moves, you can probably accept it.
If this was a 5" then I might have a different answer. Fit for purpose I guess.
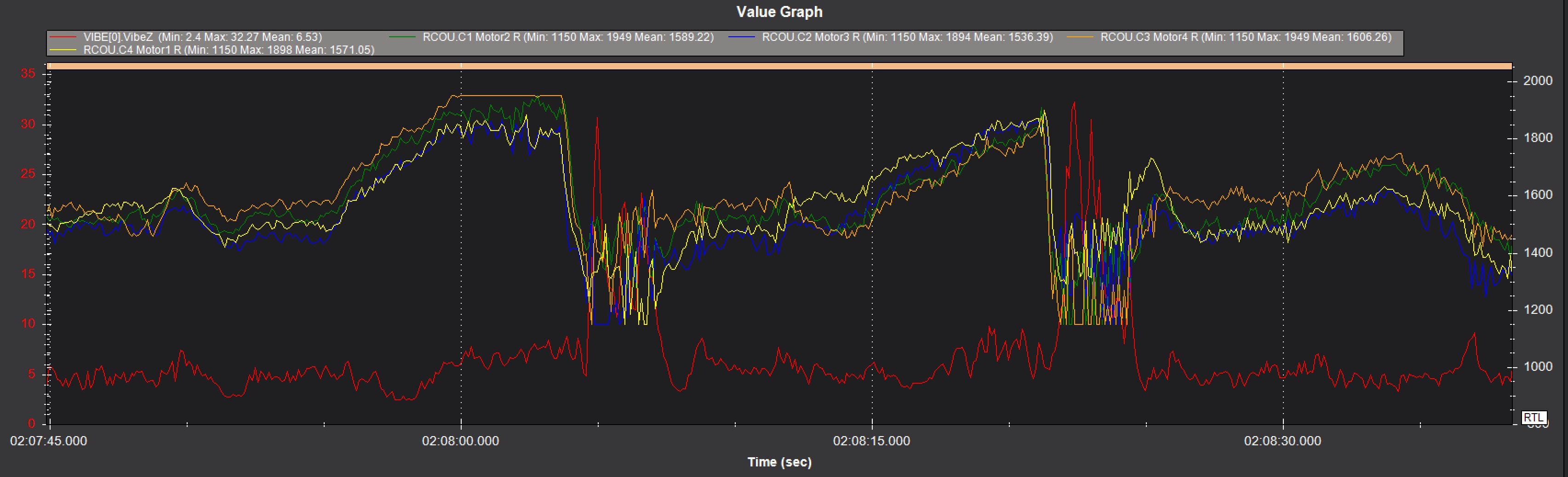
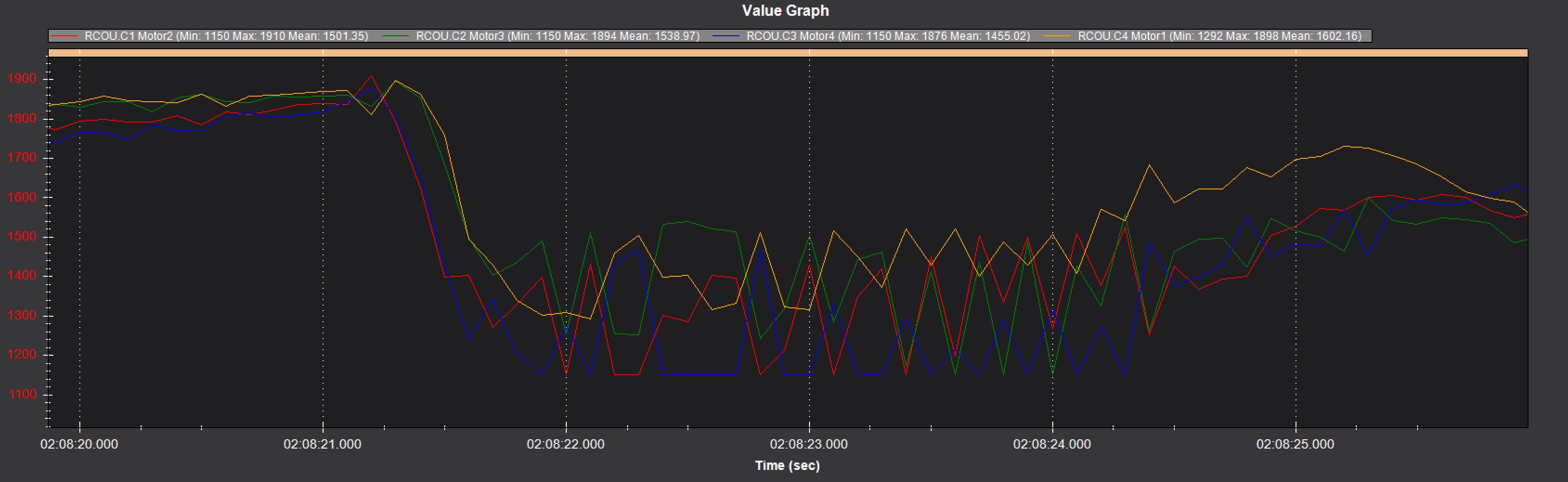
Some of the large vibe spikes align with motors at Minimum. I see you have MOT_SPIN_MIN at default. Did you go thus this? Setting Motor Ranges
Some outputs are at Max also but aggressive flying will do that.
Not sure this will make much difference there may be nothing really to see here as Attitude control is pretty good as @Allister mentioned.
You have Dshot configured, can’t you use the Bdshot version of firmware for ESC RPM?
Thanks - motor spins ok at 5% so min should be 0.1 - I have it set at 0.15. Interesting MOT_THST_HOVER is set automatically at 0.159. Do I risk not be able to land if I reduce any more weight?
I think your onto the reason. A theory being: When it brakes from max speed ~22m/s it banks and climbs a bit (as I witnessed) - motors go to minimum and the wind going through the blades possibly reversing air flow through the blades.
In this case you have blades spinning at max rpm, esc commanding them to min and high air speed on long flexible (plastic) blades. Is this causing the vibration?
My main concern is going into failsafe which has resulted in fly-aways on old frame designs.
I am trying to generate worst case scenario to prove the design.
The purpose of this design is for close formation flying flying smooth curves and smooth but sometimes high accelerations (0.5g). The drone though will respond very aggressively if it gets off path.
I’ve played with the PSC_Jerk values and to maintain tight formation flying values as high as 20 is required. Lower values like 7 as per this drone can cause drones to overshoot and come too close together. I’m also designing it for operating in wind speeds up to 15m/s.
Looks like it should be ~0.25 to me from Ctun>Tho and the learned value. I would still try lowering the MOT_SPIN_MIN value. Here it can lose stability as all motors are bouncing off of min.
Also, I know it’s common knowledge to set the PSC_ACCZ_I&P values based on Hover thrust as you have set them but you could try experimenting with increasing these values. Same ratio just a bit higher. Of course look at the motor outputs and make sure it doesn’t cause oscillation at hover.
I’ve reduced mot_spin_arm and mot_spin_min to 0.9 and tested. Strong breeze 30-50kph gusty.
I noticed pitch and roll control was working overtime as well as altitude control. Might have been the wind.
No change to vibrations. Z Vibrations still maxed out at 37 upon braking. Motors hit min a few times but not as often. Log: WeTransfer - Send Large Files & Share Photos Online - Up to 2GB Free
Motors spin at 2% so I could drop arm to 0.04 and min to 0.07.
I’m going to look at removing the 20g weight on the FC to see if moving the resonant frequency of the rubber mount higher will help. It will make amplitude bigger though.
I couldn’t tune today due to the wind.
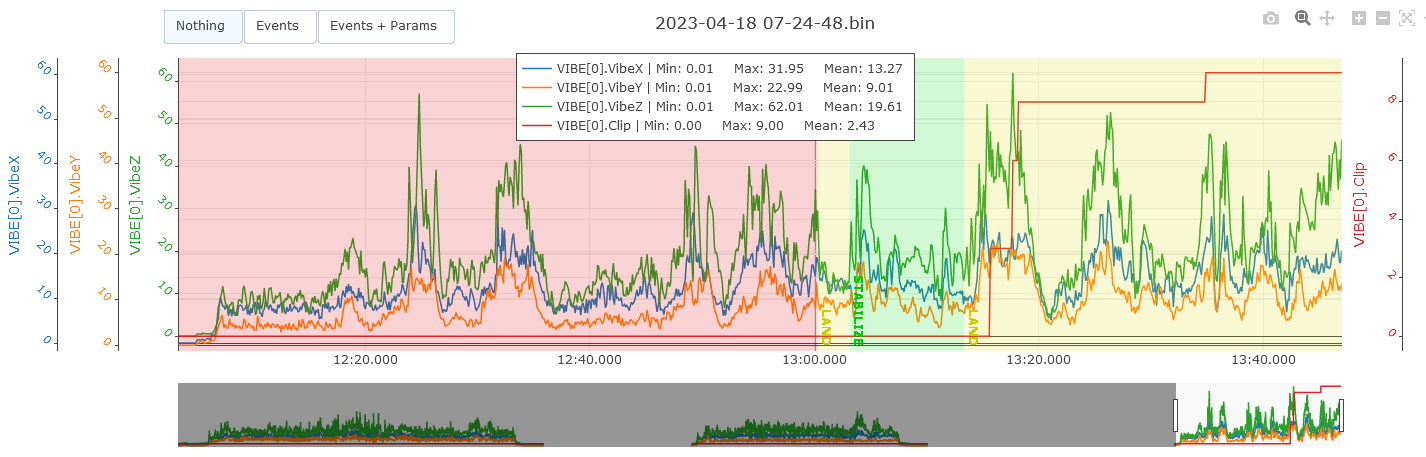
The reason I’m concerned about vibrations is the failsafes I’ve had on different frames. Whilst they had Z vibrations in the 60+ the failsafes occurred at ~30. The drone would bolt upon switching to land. Control could only be regained by switching modes and it would be controllable again until it FS and switched to land mode again and would bolt again. Clipping didn’t usually occur before FS OLD Frame:OLD Frame:OLD Frame:
I have similar issue which causes some instability sometimes when trying to brake. motors hit minimum several times which I’m pretty sure is causing the problem. it was mentioned in this post Dramatic braking in PosHold and loiter modes and behavior in windy conditions - ArduCopter / Copter 4.4 - ArduPilot Discourse.
I think the quad is overpowered (thrust to weight ratio is high). I was thinking about trying smaller props or adding some weight to the quad or just lower the braking acceleration. Let me know if you found any solution .