I have replaced all 8 motors on my X8 with the T-Motor Antigravity 4006 KV380.
I haven’t done CompassMot as of yet so FC params contains the old CompassMot calibration (not sure it relates to current problem).
I have ran Autotune twice all ended with success (almost, high pids cause strong vibrations at takeoff).
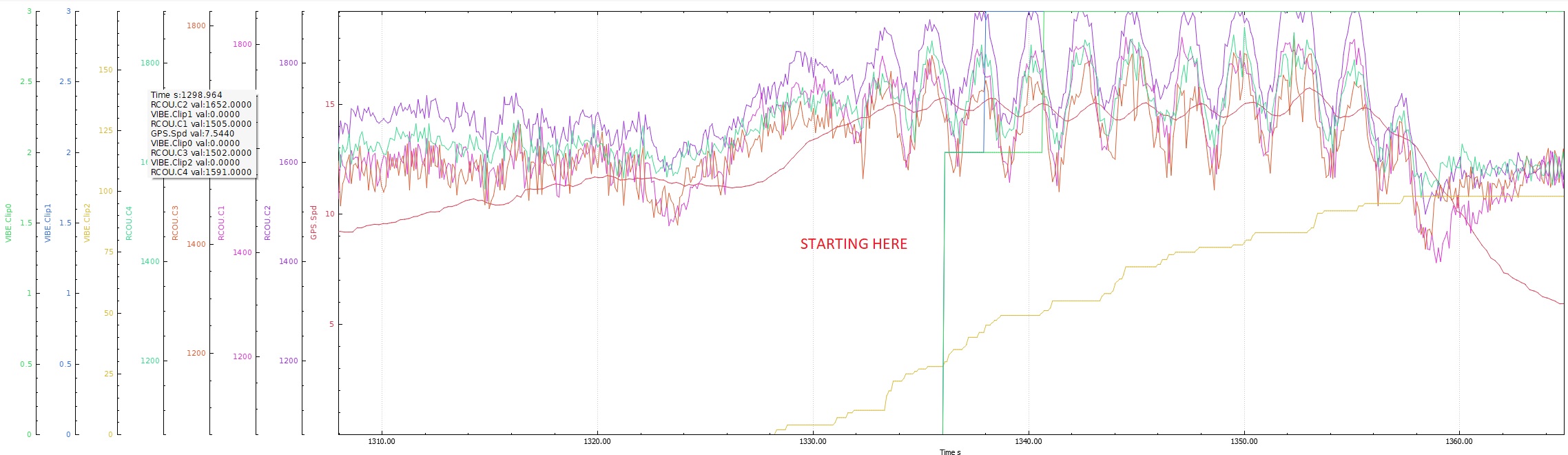
However, on test flight when I pushed the throttle all the way (and though the graph shows clipping starts at speed 11.5ms), I heard the motors sound like power up and down…
Reviewing the log file shows clipping on all axis and the RCOut on the motors is going up and down
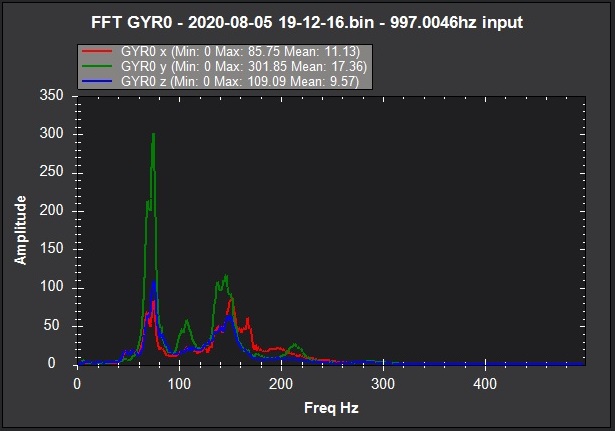
also in your FFT graph is seems that frequency of gyro noise is not static so its better to config Notch Frequency Scaling
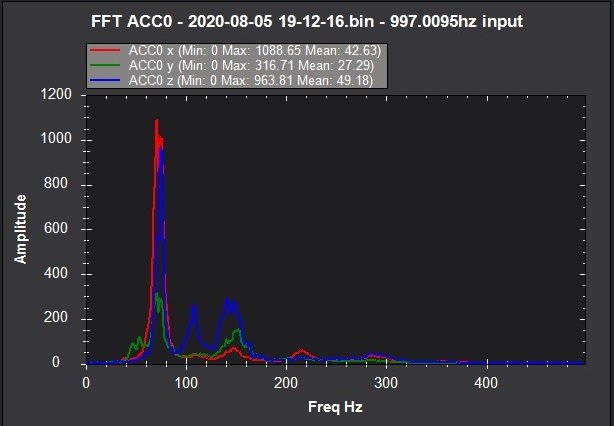
but with these all you problem is high noise on accelerometer
when copter is oscillating on higher speed or breaking with clipping its meaning that accelerometer reached its max and FC is confused in IMU measurement
unfortunately harmonic notch filtering will not help in accelerometer noise
first double check everything in your build (screws , motor balance , prop balance how fc mounted and …)
then if you have still this problem you can try this https://www.youtube.com/watch?v=A7x5NH8CTAU
i used this on my 15inch copter with good success
Hi @hosein_gh, thank you for all the information and analysis. I think that for now I shall limit the speed to 15m/s until I can find (if I ever will) the cause for that noise. As you mentioned it might be mechanical so I shall try to put also a camera facing the fuselage that might give a hint.
I know the PIDs are not great but for now it does the job ok.
As for the fft I shall read and see what I can do.